State-Space Transformation
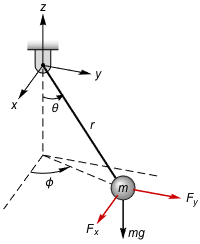
Obtain the governing equations of a spherical pendulum in Cartesian coordinates, put them into the affine state-space form, and convert them to spherical coordinates.
 |
The governing equations from the Lagrangian.
| In[1]:= | X |
| In[2]:= | X |
| Out[2]//Short= | |
The affine representation with states  and inputs
and inputs  .
.
| In[3]:= | 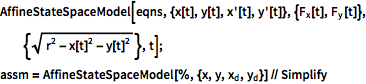 X |
| Out[3]= | 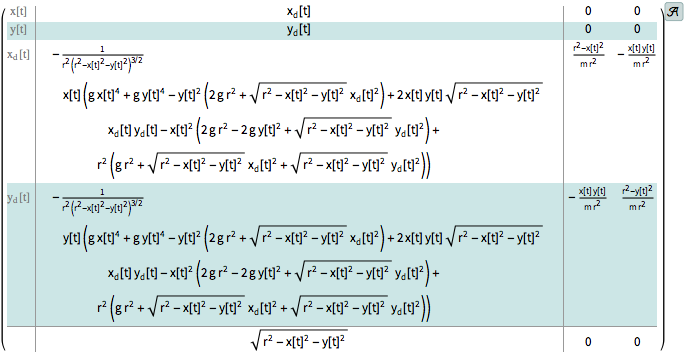 |
The transformation between spherical and Cartesian coordinates.
| In[4]:= | X |
| Out[4]= |
The transformation of the coordinate derivatives.
| In[5]:= | X |
| Out[5]= |
The complete state transformation.
| In[6]:= | X |
| Out[6]= |
The expressions in spherical coordinates are much simpler.
| In[7]:= | X |
| Out[7]= | 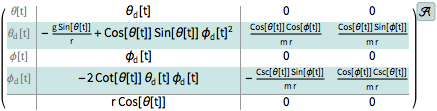 |