Нейтральная система с запаздыванием
Соединение системы первого порядка с временным запаздыванием с ПИД регулятором порождает нейтральную систему с запаздыванием. Нейтральные системы с запаздыванием содержат запаздывание в главном члене знаменателя.
| In[1]:= |  X |
| In[2]:= | X |
| Out[2]= |
Когда входной сигнал претерпевает скачок, он повторяется с промежутком, равным временной задержке.
| In[3]:= |  X |
| Out[3]= | 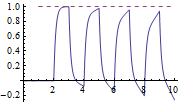 |
| In[4]:= | X |
| Out[4]= |  |
| In[5]:= |  X |
| Out[5]= |  |