Wolfram
Mathematica
8의 신기능: 통합 제어 시스템 설계
◄
이전
|
다음
►
응용 분야
상태 공간 모델 및 전달 함수 모델의 반응
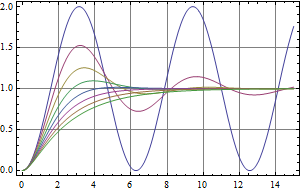
다양한 감쇠 값에 대한 보조 시스템의 반응을 알아봅니다.
In[1]:=
X
tf[\[Omega]_, \[Zeta]_] := TransferFunctionModel[\[Omega]^2/(s^2 + 2 \[Zeta] \[Omega] s + \[Omega]^2), s]
In[2]:=
X
OutputResponse[tf[1, 1/2], UnitStep[t], t]
Out[2]=
In[3]:=
X
Plot[Evaluate@ Table[Tooltip[ OutputResponse[tf[1, \[Xi]], UnitStep[t], t], \[Xi]], {\[Xi], Range[0, 1.4, 0.2]}], {t, 0, 15}, Frame -> True, PlotRange -> All, ImageSize -> 300, GridLines -> Automatic]
Out[3]=