Áreas de Aplicação
Simule a resposta de modelos de estado-espaço ou da função de transferência
O passo das respostas de um sistema de segunda ordem para diferentes valores de amortecimento.
| In[1]:= | X |
| In[2]:= | X |
| Out[2]= |  |
| In[3]:= |  X |
| Out[3]= | 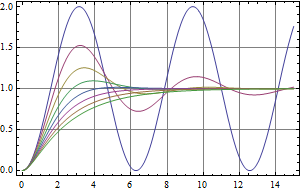 |
| Novos Recursos do Mathematica 8: Projeto de Sistemas de Controle Integrado | ◄ anterior | próximo ► |
| In[1]:= | X |
| In[2]:= | X |
| Out[2]= | |
| In[3]:= | X |
| Out[3]= | |