Wolfram
Mathematica
8의 신기능: 통합 제어 시스템 설계
◄
이전
|
다음
►
응용 분야
선형, 시간 불변 시스템의 자연형 모델링
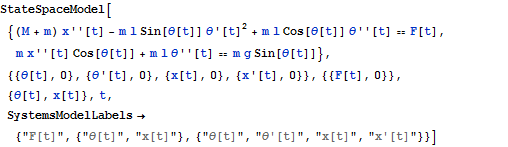
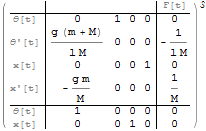
도립 진자의 선형화된 상태-공간 모델은 운동 방정식으로 생성되며 기본 형태의 타입셋으로 나타낼 수 있습니다.
In[1]:=
X
StateSpaceModel[{(M + m) x''[t] - m l Sin[\[Theta][t]] \[Theta]'[t]^2 + m l Cos[\[Theta][t]] \[Theta]''[t] == F[t], m x''[t] Cos[\[Theta][t]] + m l \[Theta]''[t] == m g Sin[\[Theta][t]]}, {{\[Theta][t], 0}, {\[Theta]'[t], 0}, {x[t], 0}, {x'[t], 0}}, {{F[t], 0}}, {\[Theta][t], x[t]}, t, SystemsModelLabels -> {"F[t]", {"\[Theta][t]", "x[t]"}, {"\[Theta][t]", "\[Theta]'[t]", "x[t]", "x'[t]"}}]
Out[1]=