Прикладные области
Определение моделей линейных, стационарных систем в естественной форме
Линеаризированная модель обратного маятника в пространстве состояний создается из лежащих в основе уравнений движения, заданных в естественной традиционной форме.
| In[1]:= | 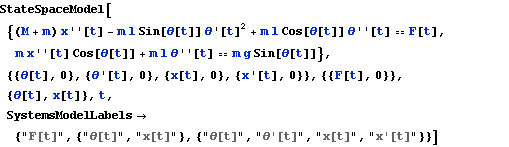 X |
| Out[1]= | 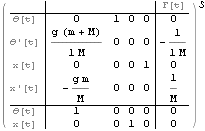 |