Кривошипно-ползунный механизм
| In[7]:= |  X |
| In[8]:= |  X |
| In[9]:= |  X |
| In[10]:= |  X |
| In[11]:= |  X |
| In[12]:= | 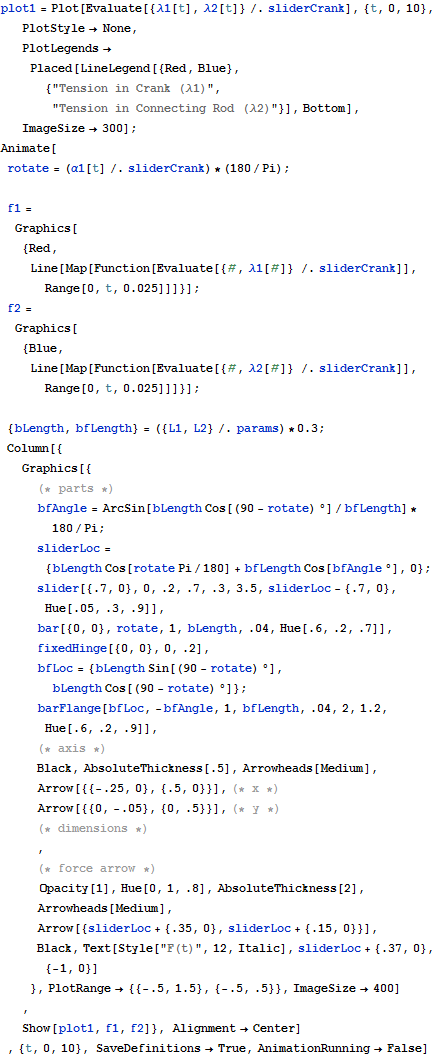 X |
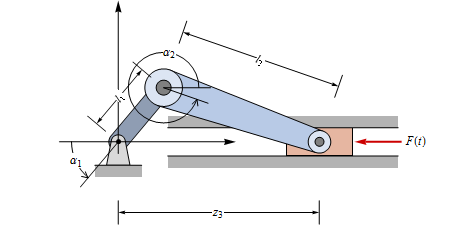
Моделирование движения простого кривошипно-ползунного механизма под внешним воздействием.
 X |
Состояние кривошипно-ползунного механизма может быть полностью задано двумя углами  1, 2 и положением ползунка
1, 2 и положением ползунка  , заданным его расстоянием до начала координат.
, заданным его расстоянием до начала координат.
| In[1]:= | X |
Зададим силу, действующую на ползунок.
| In[2]:= | X |
Уравнения движения получаются нахождением сил и применением второго закона Ньютона  и
и  . Кривошип и соединительная штанга имеют массу, а следовательно и инерцию.
. Кривошип и соединительная штанга имеют массу, а следовательно и инерцию.
| In[3]:= | 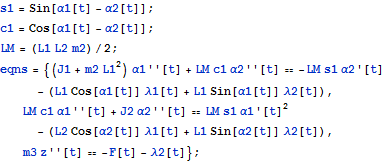 X |
Алгебраические уравнения определяют геометрию системы.
| In[4]:= | X |
Зададим физические параметры системы. Здесь  и
и  обозначают моменты инерции.
обозначают моменты инерции.
| In[5]:= | X |
Решаем систему и визуализируем решение.
| In[6]:= |  X |
Play Animation » Stop Animation »  |