A Neutral Time-Delay System
Connecting a first-order-plus-time-delay model with a PID controller gives a neutral time-delay system. Neutral time-delay systems have delays on the highest-order term in the denominator.
| In[1]:= |  X |
| In[2]:= | X |
| Out[2]= |
When the input has a discontinuity, it is repeated at each multiple of the delay.
| In[3]:= |  X |
| Out[3]= | 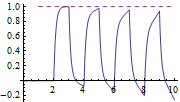 |
| In[4]:= | X |
| Out[4]= | 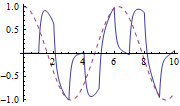 |
| In[5]:= |  X |
| Out[5]= | 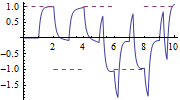 |