Design a Feedback Controller for a Mixing Tank
The equations for a chemical's concentration in a mixing tank with two inflows and one outflow are Taylor linearized about an operating point to produce a descriptor state-space model.
 |
| In[1]:= |  X |
| In[2]:= |  X |
| Out[2]= |  |
Because the system is of order 2, a feedback controller can assign two poles.
| In[3]:= | X |
| Out[3]= |
| In[4]:= | X |
| Out[4]= |
Obtain the closed-loop system.
| In[5]:= | X |
| Out[5]= |  |
The closed-loop system reacts considerably faster to changes than the uncompensated system.
| In[6]:= | X |
| In[7]:= |  X |
| Out[7]= | 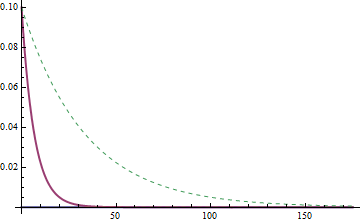 |