Создание предиктора Смита для корпусного реактора
Изотермальный смесительный реактор непрерывного действия (CSTR) можно моделировать с помощью системы первого порядка с временным запаздыванием.
| In[1]:= | X |
Проектирование ПИ регулятора, у которого время задержки равно нулю приводит к неустойчивой системе с обратной связью.
| In[2]:= |  X |
| Out[2]= |
| In[3]:= |  X |
| Out[3]= | 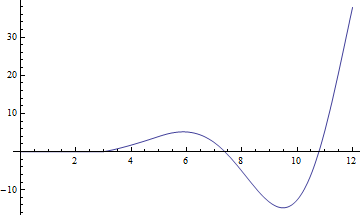 |
Используем команду SmithDelayCompensator для создания стабилизирующего регулятора для системы с временной задержкой.
| In[4]:= |  X |
| Out[4]= |
| In[5]:= |  X |
| Out[5]= | 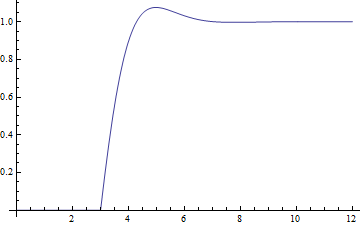 |