Design a Vehicle Crash Controller for an Automated Highway System
Design a PID controller to maintain the specified relative speed between two automobiles and guide the active vehicle as commanded.
 |
The automobile system model.
| In[1]:= | X |
A PID controller for the system.
| In[2]:= | X |
Model the prescribed constant relative speed as a step reference and simulate the response of the closed-loop system.
| In[3]:= | X |
| In[4]:= | X |
| Out[4]= | 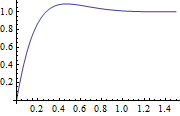 |