Управление охлаждающим вентилятором на расстоянии
Модель управления вентилятором может содержать несколько временных задержек.
| In[1]:= | 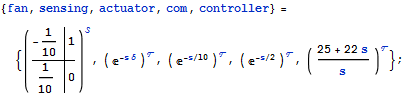 X |
Контроллер, работающий с вентилятором непосредственно, может давать сбой при наличии временных задержек.
| In[2]:= |  X |
| Out[2]= | 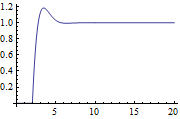 |
| In[3]:= | 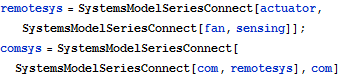 X |
| Out[3]= |  |
| In[4]:= |  X |
| Out[4]= |  |
Вентилятор с обратной связью, спроектированный с помощью предиктора Смита, обладает теми же характеристиками, что и вентилятор без задержек.
| In[5]:= |  X |
| In[6]:= |  X |
| In[7]:= |  X |
| Out[7]= | 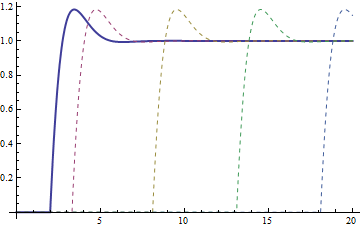 |