nodelay[d_] := First[NDSolve[{x''[t] + d x'[t] + Sin[x[t]] == -x[t] Cos[x[t]], x'[0] == 0, x[0] == .1}, x, {t, 0, 50}]];
withdelay[\[Tau]_, d_] := First[NDSolve[{x''[t] + d x'[t] + Sin[x[t]] == -x[t - \[Tau]] Cos[x[t]], x[t /; t <= 0] == .1}, x, {t, 0, 50}]]
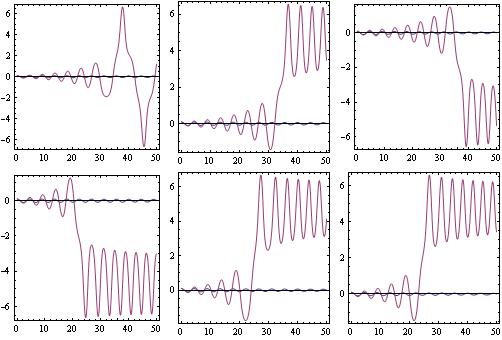
Grid[Table[ Plot[Evaluate[{x[t] /. {nodelay[d], withdelay[\[Tau], d]}}], {t, 0, 50}, AspectRatio -> 1, PlotRange -> All, Frame -> True], {\[Tau], {.2, .3}}, {d, {0.01, 0.02, 0.03}}]]