Friction Models
| In[5]:= |  X |
| In[8]:= |  X |
| In[11]:= |  X |
| In[16]:= |  X |
| In[17]:= |  X |
| In[18]:= |  X |
| In[19]:= |  X |
Play Animation » Stop Animation »  |
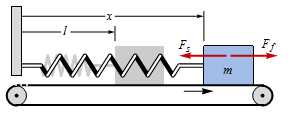
Model a block on a moving conveyor belt anchored to a wall by a spring, using different models for the friction force  . Compare positions and velocities for the different models. The preceding animation shows the final refinement of the model, which incorporates four types of friction: viscous, Coulomb, Stribeck, and static.
. Compare positions and velocities for the different models. The preceding animation shows the final refinement of the model, which incorporates four types of friction: viscous, Coulomb, Stribeck, and static.
 X |
| In[1]:= |  X |
Viscous friction is proportional to the relative velocity  .
.
| In[2]:= | X |
| In[3]:= | X |
| In[4]:= | X |
The block quickly settles in a stable position.
| Out[5]= |  |
Coulomb friction is proportional to the sign of relative velocity  .
.
| In[6]:= | X |
| In[7]:= | X |
With the addition of Coulomb friction, the block initially sticks to the belt before settling down.
| Out[8]= | 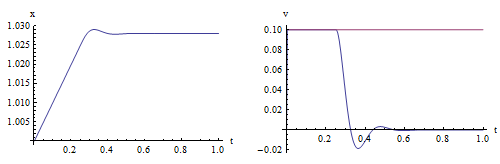 |
Stribeck friction is a refined Coulomb friction  .
.
| In[9]:= | X |
| In[10]:= | X |
The relative effect of Stribeck friction in the model is small.
| Out[11]= | 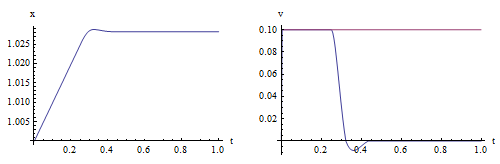 |
Static friction holds the block in place until the spring force exceeds some value  , depending on the roughness of the surfaces.
, depending on the roughness of the surfaces.
| In[12]:= | X |
| In[13]:= |  X |
| In[14]:= | 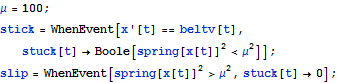 X |
| In[15]:= |  X |
The block repeatedly sticks to the belt due to frictional forces and then slips back due to the spring force.
| Out[16]= | 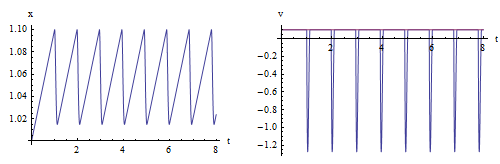 |
Compare the successively refined friction models.
| Out[17]= |  |