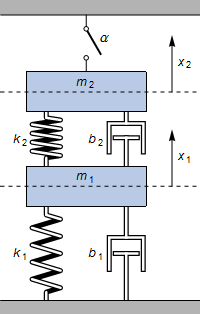
Механическая система с алгебраическими связями
Этот пружинно-массовый демпфер включает жёсткий стержень, способный предотвращать движение второй массы.
 |
| In[1]:= | 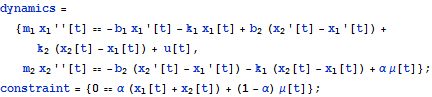 X |
Получим представление модели в пространстве состояний, используя StateSpaceModel.
| In[2]:= |  X |
| Out[2]= | 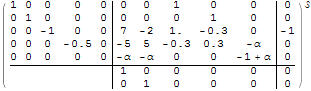 |
Используем команду OutputResponse для моделирования системы, как в случае, когда стержень фиксирован, и в случае, когда он свободен.
| In[3]:= |  X |
| In[4]:= | X |
| Out[4]= | 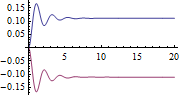 |
| In[5]:= | X |
| Out[5]= | 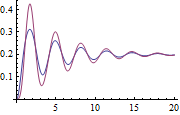 |