Отклики замкнутой системы с ПИД регулятором
 |
Построение графиков отклика и сигнала управления для различных внешних входных сигналов.
| In[1]:= | X |
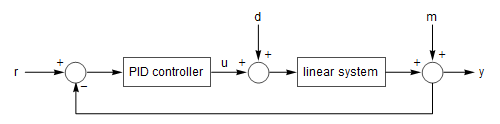
Отклик и сигнал управления для процесса возмущения меандр (SquareWave).
| In[2]:= |  X |
| In[3]:= | X |
| Out[3]= | 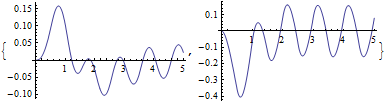 |
Отклик и сигнал управления для опорного сигнала UnitBox.
| In[4]:= |  X |
| In[5]:= | X |
| Out[5]= | 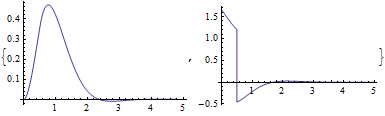 |
Отклик и сигнал управления для линейных помех в сенсоре.
| In[6]:= |  X |
| In[7]:= | X |
| Out[7]= |  |