Устранение импульса
Решение модели в пространстве состояний (см. StateSpaceModel) с сингулярно- дескрипторной матрицей может содержать производные входных сигналов. В случае, когда входной сигнал претерпевает скачок, выходной сигнал может содержать нежелаемые импульсы.
| In[1]:= | 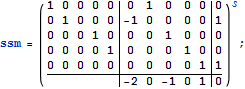 X |
| In[2]:= | X |
| Out[2]= |
Если система управляема, почти любой регулятор обратной связи устранит эти импульсы.
| In[3]:= | X |
| Out[3]= |
| In[4]:= | X |
| Out[4]= | 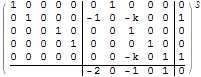 |
| In[5]:= | X |
| Out[5]= |