Пропорционально-фильтр-дифференциальный регулятор
Моделирование положения движущегося тела массой 1 кг, и использование дискретизированного пропорционально-фильтр-дифференциального (ПД) регулятора для удержания положения объекта на постоянном опорном уровне.
 |
| In[1]:= | 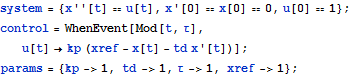 X |
| In[2]:= | X |
| In[3]:= | X |
| Out[3]= | 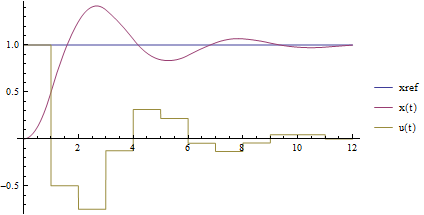 |