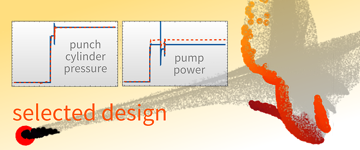
Industrial Manufacturing
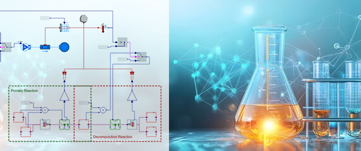
Model new manufacturing processes prior to implementation or existing ones in order to diagnose problems. Use Mathematica for analyses including pre- and post-processing of models, simulations, and results.




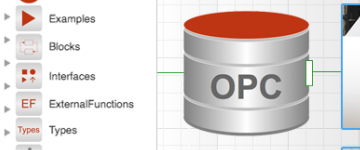
Connecting Systems with OPC
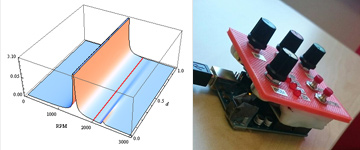
The OPC Classic Library allows you to connect your simulation models to the real world using Open Platform Communication (OPC). Here, you will connect a process plant model and a real-world Programmable Logic Controller (PLC) in System Modeler to allow them to communicate with each other through OPC.
Wolfram System Modeler
Try
Buy
System Modeler is available in English
and Japanese
on Windows, macOS & Linux »
Questions? Comments? Contact a Wolfram expert »