Keypoints to Find Projective Transformation
Version 12 adds many new types of keypoints to ImageKeypoints that can be used to detect and track points of interest. ORB keypoint descriptors are very fast to compute and are rotation invariant, so they are excellent candidates for computing transformation matrices from corresponding points.
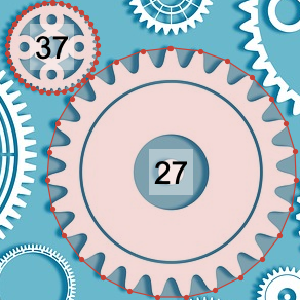
Compute the corresponding points using ImageCorrespondingPoints.
Then we compute the geometric transformation matrix.
Here are the shapes of the two arcs in the first image.
Using the estimated transformation matrix, you can find transformed arc regions in the second image.