제어기 설계하기
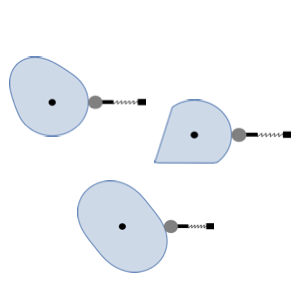
제어기는 로켓 발사, 마천루, 세그웨이 등 다양한 곳에서 볼 수 있습니다. Wolfram 언어의 제어 시스템 프레임워크 및 시스템 모델을 결합하여 쉽게 제어 시스템을 설계하고 테스트할 수 있습니다. 이 예는 모델의 선형화 표현에 따라 세그웨이를 세워두는 제어기를 설계합니다.
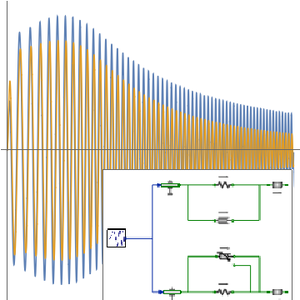
모델의 초기 값을 사용하여 서 있는 상태의 세그웨이 모델을 선형화하고 필요한 상태 변수를 추출합니다.
제어 설계를 위한 무게 변수를 정의합니다. 세그웨이 각도 변동에 대하여 큰 패널티를 사용합니다 (revolute1.phi).
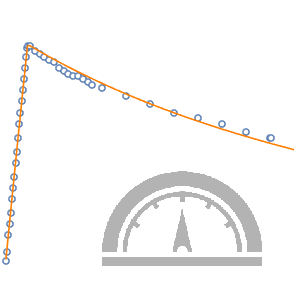
LQ 제어기의 게인을 계산합니다.
LQ 제어 장치의 계산된 값을 컨트롤된 모델에 저장합니다.
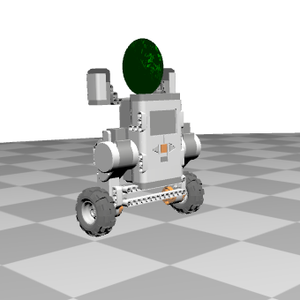
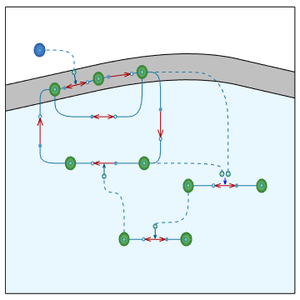
모델에 저장된 제어 파라미터를 사용하여 SystemModeler에서 3D 애니메이션을 표시합니다.