Contrôleurs de modèles
On trouve des contrôleurs dans tous les domaines, tels que les fusées au décollage, les gratte-ciels et les Segways. En combinant le cadre du système de contrôle de Wolfram Language avec des modèles de systèmes, les systèmes de contrôle peuvent être facilement conçus et testés. Dans cet exemple, un contrôleur permettant de maintenir un Segway en position verticale est conçu, sur la base d'une représentation linéarisée du modèle.
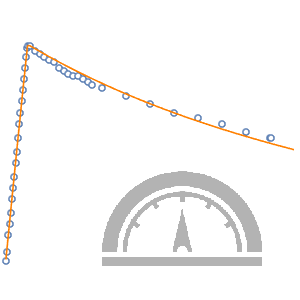
Linéarisez un modèle Segway autour de la position verticale en utilisant les valeurs initiales du modèle et extrayez les variables d'état qui vous intéressent.
Définissez les variables de poids pour le modèle de commande. Utilisez une grande pénalité pour les déviations de l'angle du Segway (revolute1.phi).
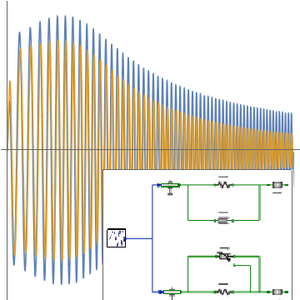
Calculez les gains pour le contrôleur LQ.
Enregistrez les valeurs calculées du contrôleur LQ dans le modèle avec un contrôleur.
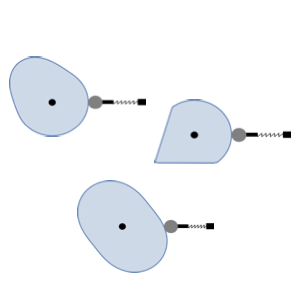
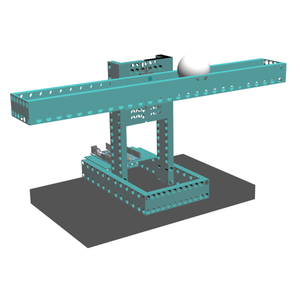
Avec les paramètres de régulation sauvegardés dans le modèle, affichez une animation 3D dans SystemModeler.