制御器を設計する
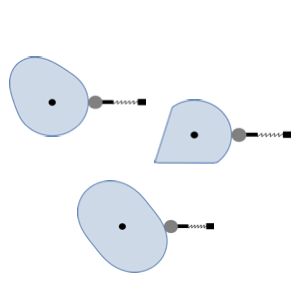
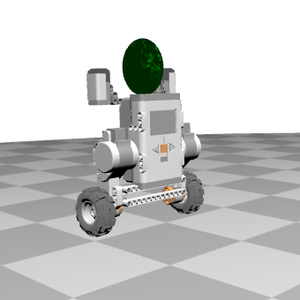
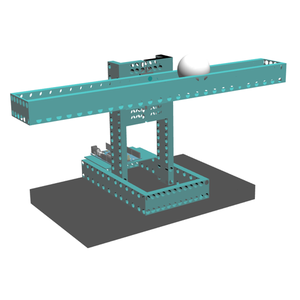
制御器はロケットの打上げ,摩天楼,セグウェイ等いろいろなもので見られる.Wolfram言語の制御系フレームワークとシステムモデルを組み合せることによって,簡単に制御系を設計してテストすることができる.この例では,モデルの線形化表現に基づいて,セグウェイを立たせたままにする制御器を設計する.
モデルの初期値を使って,立った状態のセグウェイモデルを線形化し,必要な状態変数を抽出する.
制御設計のための重さ変数を定義する.セグウェイの角度の変動に対して大きいペナルティを使う(revolute1.phi).
LQ制御器のゲインを計算する.
LQ制御器の計算された値を,制御器付きのモデルに保存する.
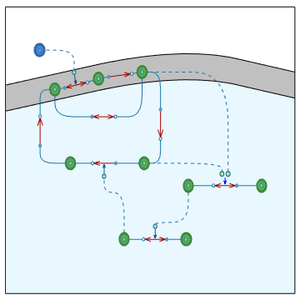
モデルに保存された制御パラメータを使って,SystemModelerで3Dアニメーションを表示する.