欧拉转动
版本 11 引入了 EulerMatrix 来描述相对于一个运动坐标系的一系列转动.
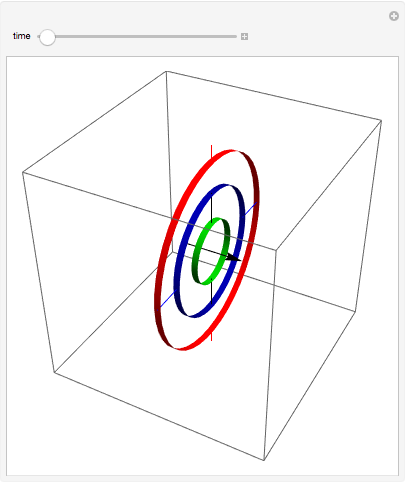
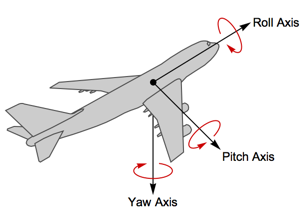
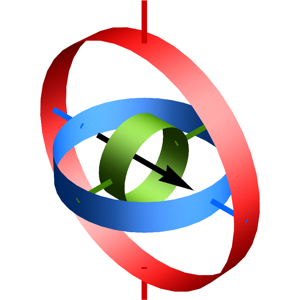
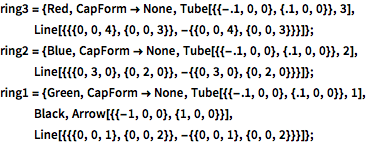
模拟一个平衡环架. 每个欧拉角是相对于各轴的相对转动角.
显示完整的 Wolfram 语言输入
In[2]:=
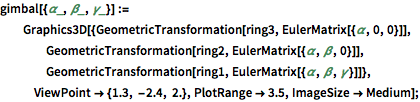
gimbal[{\[Alpha]_, \[Beta]_, \[Gamma]_}] :=
Graphics3D[{GeometricTransformation[ring3,
EulerMatrix[{\[Alpha], 0, 0}]],
GeometricTransformation[ring2,
EulerMatrix[{\[Alpha], \[Beta], 0}]],
GeometricTransformation[ring1,
EulerMatrix[{\[Alpha], \[Beta], \[Gamma]}]]},
ViewPoint -> {1.3, -2.4, 2.}, PlotRange -> 3.5,
ImageSize -> Medium];In[3]:=
gimbalframes = Table[gimbal[{i, i, i}], {i, 0, 2 Pi, Pi/32}];In[4]:=
Manipulate[
gimbalframes[[i]], {{i, 1, "time"}, 1, Length[gimbalframes], 1},
SaveDefinitions -> True]Out[4]=