Unterstützte Systemmodelle
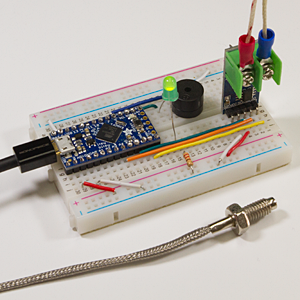
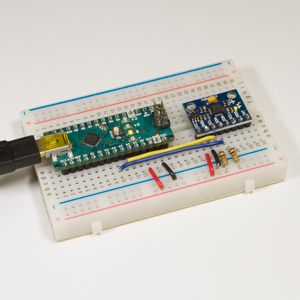
Ein Mikrocontroller ist im Wesentlichen eine Ein- und Ausgabevorrichtung, die Eingänge liest, Berechnungen durchführt und Ausgänge ausgibt. Die verfügbaren unterschiedlichen Systemmodelle beschreiben die Struktur der Ein- und Ausgänge und die Berechnungen. Dazu gehören das zeitdiskrete TransferFunctionModel, StateSpaceModel, AffineStateSpaceModel, NonlinearStateSpaceModel und das SystemsConnectionsModel. Mit diesen Modellen können Filter, Regler und andere Eingang-Ausgang-Modelle für Signalverarbeitung, Reglerentwurf, Modellierung und Datenerfassung beschrieben werden.
Mit einer TransferFunctionModel können Sie lineare Systeme wie z.B. einen Integrator beschreiben.
Deployen Sie den Integrator.
Das entsprechende StateSpaceModel.
Deployen Sie das Zustandsraumdarstellung des Integrators.
Der Footprint des Codes der Zustandsraumdarstellung ist in der Regel kleiner.
Ein AffineStateSpaceModel kann nur ein eingangslineares System beschreiben, jedoch kein nichtlineares System. Dies ist nützlich, um nichtlineare Schätzer, Regler basierend auf nichtlinearen Beobachtern und nichtlineare Zustandsrückführung oder Modelle für HIL-Simulationen zu beschreiben. Im Folgenden erzeugen wir das Modell eines nichtlinearen Schätzers. »
Es ist eingangslinear.
Deployen Sie den Schätzer.
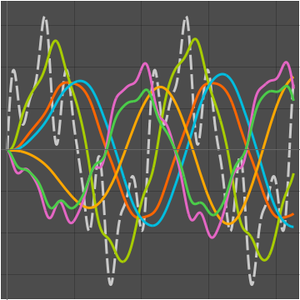
Ein NonlinearStateSpaceModel kann ein System beschreiben, dessen Eingänge nichtlinear sind. Ein Reglerentwurf durch nichtlineare Zustandsrückführung. »
Deployen Sie den Regler.
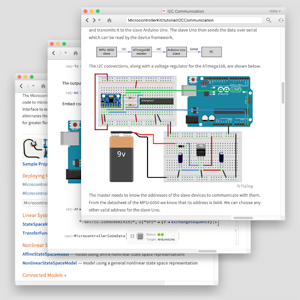
Ein SystemsConnectionsModel kann ein System verbundener Systeme beschreiben.
Die Komponenten des Reglers.
Deployen Sie den Regler.