Einen Schrittmotor ansteuern
In der Steuerungstechnik mit offenem Wirkungsweg entnimmt der Regler seine Informationen nicht aus dem gesteuerten System, er erhält also keine Rückmeldung des Systems. Der Steuerungsaufwand wird durch ein anderes System oder manuell durch einen menschlichen Bediener festgesetzt.
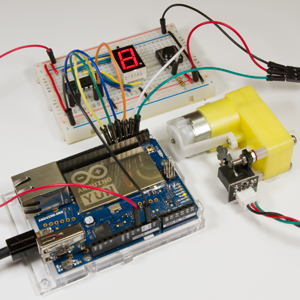
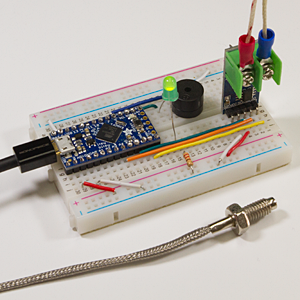
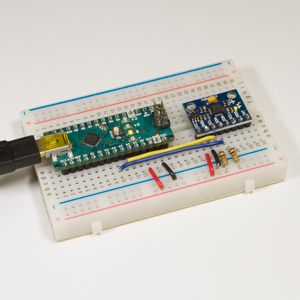
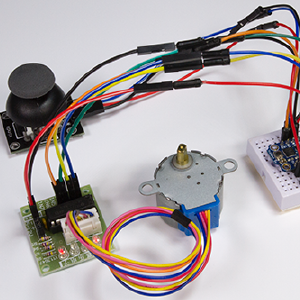
In diesem Beispiel wird ein Joystick verwendet, um die Anzahl der Schritte und die Drehrichtung eines 28BYJ48 Schrittmotors festzulegen. Die Impulsfolge wird entsprechend den Messungen des Joysticks auf einen Adafruit Trinket-Mikrocontroller gespielt. Die Pinbelegung des Mikrocontrollers und die Impulsfolge des Schrittmotors werden in einer externen Library beschrieben. Der Code in der externen Library sowie der generierte Code werden verwendet, um den Schrittmotors anzusteuern.
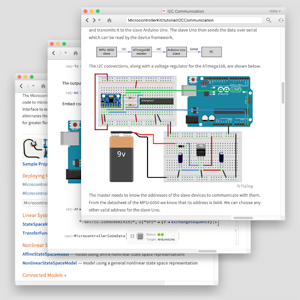
Der Schaltplan der Anschlüsse.
Die vollständige Umdrehung besteht aus 512 Schritten und kann in kleinere Schrittlänge zerlegt werden.
Wir steuern den Motor um jeweils 8 Schritte an.
Die Vorwärtsbewegung der Steuerung über 3V ergibt 8 Schritte.
Ein Wert unter 1V resultiert in Schritten in die entgegengesetzte Richtung.
Definieren Sie die Schrittmotorsteuerung.
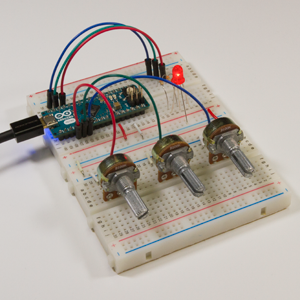
Der Joystick-Eingang.
Die Ausgabe wird von der externen Library verwaltet und verwendet die Pins 0–3 des Trinket.
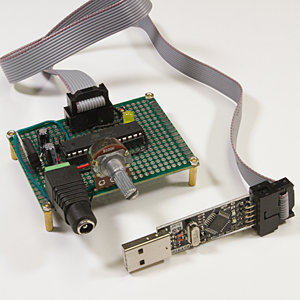
Die vollständige Konfigurierung des Mikrocontrollers.
Der Trinket verwendet USBtiny.
Das Verzeichnis der Library.
Laden Sie den Code. Eventuell müssen Sie den Joystick-Eingang vor dem Laden unterbrechen.