慣性モーメント
回転の慣性を含む,剛体の物理的パラメータを扱う新しい機能.
In[1]:=
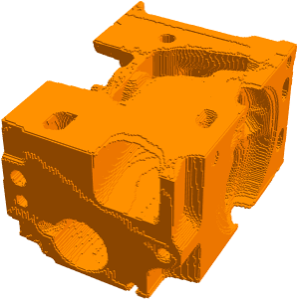
wrench = ExampleData[{"Geometry3D", "Wrench"}, "Region"]Out[1]=

レンチを回転させる点を選ぶ.
In[2]:=
point = {-8, -0.168, 0};In[3]:=
Show[wrench, Graphics3D[{PointSize[Large], Point[point]}],
ViewPoint -> {0, -\[Infinity], 0}]Out[3]=

この点を中心とする慣性行列.
In[4]:=
\[ScriptCapitalI] = MomentOfInertia[wrench, point]Out[4]=
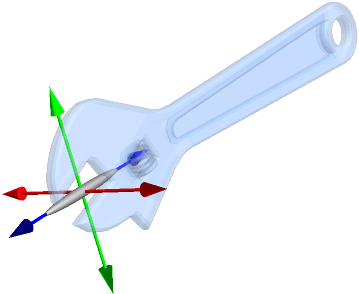
ボディを回転させるための軸である主軸を求める.
In[5]:=
principalaxes = Eigenvectors[\[ScriptCapitalI]]Out[5]=
半径が主軸の周りで高速化することに対する相対抵抗を示す,慣性楕円体を求める.
In[6]:=
inertiaellipsoid = Ellipsoid[point, 1000 Inverse[\[ScriptCapitalI]]]Out[6]=
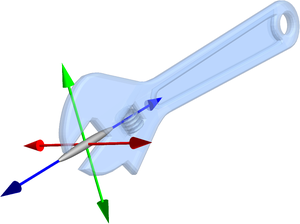
レンチをその主軸および慣性楕円体とともに表示する.レンチの持ち手は,その主軸に沿って楕円体を引き伸ばす.
完全なWolfram言語入力を表示する
In[8]:=
Show[wrench, axes, BaseStyle -> Opacity[0.3]]Out[8]=