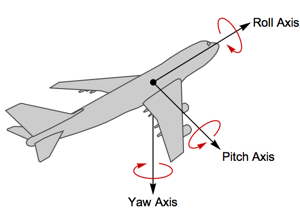
‹›主な幾何学的機能ロール・ピッチ・ヨーの回転
バージョン11には,固定された座標枠についての回転シーケンスを表すRollPitchYawMatrixが導入されている.この関数は,しばしばロボット工学や航空宇宙における剛体の回転をモデル化するのに使われる.
完全なWolfram言語入力を表示する
iShow[trans_] :=
Show[trans, Method -> {"ShrinkWrap" -> False}, PlotRange -> 8,
ImageSize -> {300, 300}];
plane = ExampleData[{"Geometry3D", "SpaceShuttle"}, "Region"];
Manipulate[
iShow[TransformedRegion[plane,
AffineTransform@RollPitchYawMatrix[{r, p, y}, {1, 2, 3}]]], {{r, 0,
"roll"}, -Pi, Pi, Pi/32}, {{p, 0, "pitch"}, -Pi, Pi,
Pi/32}, {{y, 0, "yaw"}, -Pi, Pi, Pi/32}, SaveDefinitions -> True]