‹›Geometría computacionalRotaciones de cabeceo, alabeo y guiñada
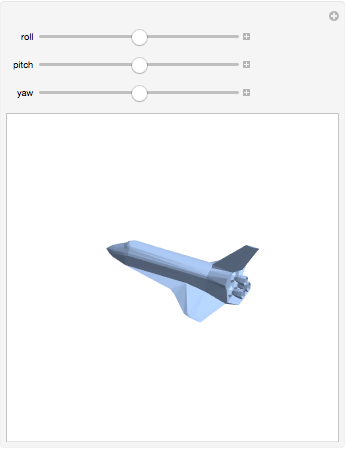
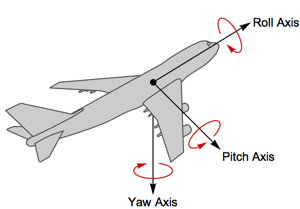
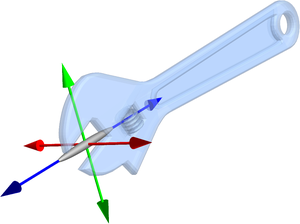
La versión 11 introduce RollPitchYawMatrix para describir una secuencia de rotaciones con respecto a un marco de coordenadas fijo. Es usualmente utilizado para modelar rotaciones de cuerpos rígidos en robótica y aeronáutica.
muestre la entrada completa de Wolfram Language
iShow[trans_] :=
Show[trans, Method -> {"ShrinkWrap" -> False}, PlotRange -> 8,
ImageSize -> {300, 300}];
plane = ExampleData[{"Geometry3D", "SpaceShuttle"}, "Region"];
Manipulate[
iShow[TransformedRegion[plane,
AffineTransform@RollPitchYawMatrix[{r, p, y}, {1, 2, 3}]]], {{r, 0,
"roll"}, -Pi, Pi, Pi/32}, {{p, 0, "pitch"}, -Pi, Pi,
Pi/32}, {{y, 0, "yaw"}, -Pi, Pi, Pi/32}, SaveDefinitions -> True]