‹›核心几何滚动、俯仰和偏航转动
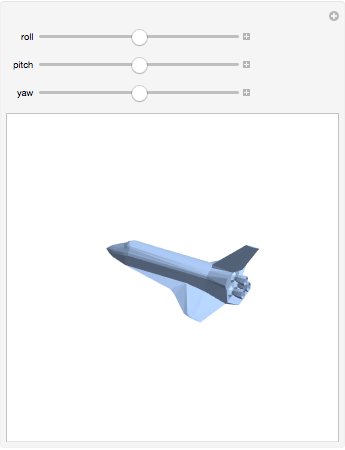
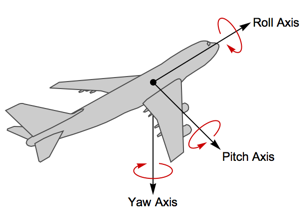
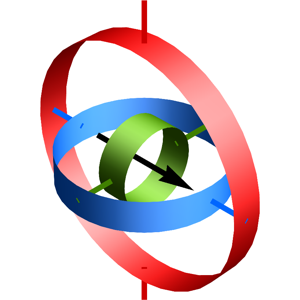
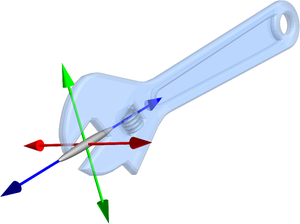
版本 11 引入了 RollPitchYawMatrix 来描述相对于一个固定坐标系的一系列转动. 它通常在机器人和航空航天领域用于刚体转动建模.
显示完整的 Wolfram 语言输入
iShow[trans_] :=
Show[trans, Method -> {"ShrinkWrap" -> False}, PlotRange -> 8,
ImageSize -> {300, 300}];
plane = ExampleData[{"Geometry3D", "SpaceShuttle"}, "Region"];
Manipulate[
iShow[TransformedRegion[plane,
AffineTransform@RollPitchYawMatrix[{r, p, y}, {1, 2, 3}]]], {{r, 0,
"roll"}, -Pi, Pi, Pi/32}, {{p, 0, "pitch"}, -Pi, Pi,
Pi/32}, {{y, 0, "yaw"}, -Pi, Pi, Pi/32}, SaveDefinitions -> True]