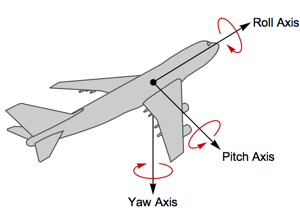
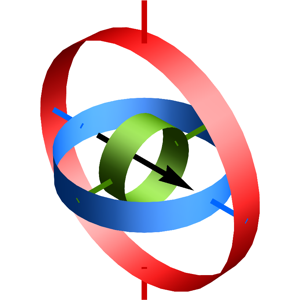
‹›주요 기하학적 기능롤 (Roll), 피치 (Pitch), 요(Yaw) 회전
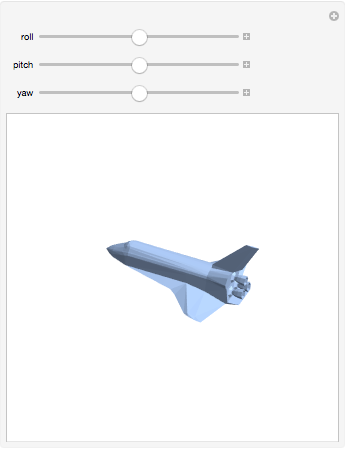
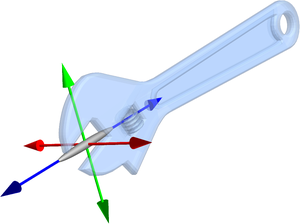
버전 11은 고정된 좌표 프레임에 대한 회전 순서를 나타내는 RollPitchYawMatrix를 도입하였습니다. 이 함수는 종종 로봇 공학 및 항공 우주 분야에서 강체의 회전 모델링에 사용됩니다.
전체 Wolfram 언어 입력 표시하기
iShow[trans_] :=
Show[trans, Method -> {"ShrinkWrap" -> False}, PlotRange -> 8,
ImageSize -> {300, 300}];
plane = ExampleData[{"Geometry3D", "SpaceShuttle"}, "Region"];
Manipulate[
iShow[TransformedRegion[plane,
AffineTransform@RollPitchYawMatrix[{r, p, y}, {1, 2, 3}]]], {{r, 0,
"roll"}, -Pi, Pi, Pi/32}, {{p, 0, "pitch"}, -Pi, Pi,
Pi/32}, {{y, 0, "yaw"}, -Pi, Pi, Pi/32}, SaveDefinitions -> True]