支持的系统模型
微控制器本质上是一个输入输出设备,它读取输入,执行计算并发送输出。各种系统模型是描述输入-输出结构和计算的自然框架。这些包括离散时间 TransferFunctionModel、StateSpaceModel、AffineStateSpaceModel、NonlinearStateSpaceModel 和 SystemsConnectionsModel。它们可用于在信号处理、控制器设计、建模和数据采集中描述滤波器、控制器和其他输入输出模型。
显示完整的 Wolfram 语言输入
可使用 TransferFunctionModel 来描述线性系统,如积分器。
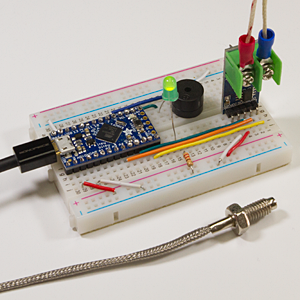
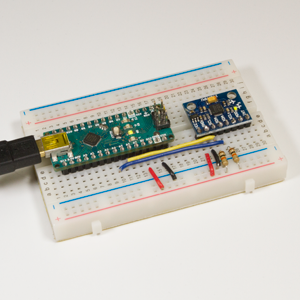
部署积分器。
对应的 StateSpaceModel。
部署积分器的状态空间实现。
状态空间实现的代码占用空间通常较小。
AffineStateSpaceModel 可以描述仅输入线性但状态不是线性的系统。这对于描述非线性估计器,基于线性观测器的控制器和非线性状态反馈或 HIL 仿真模型非常有用。非线性估计起的模型。»
它是线性输入。
部署估计器。
NonlinearStateSpaceModel 也可以描述输入是非线性的系统。非线性状态反馈控制器。»
部署控制器。
SystemsConnectionsModel 可以描述连接系统。
控制器的分量。
部署控制器。