하드웨어에 컨트롤러 배치하기
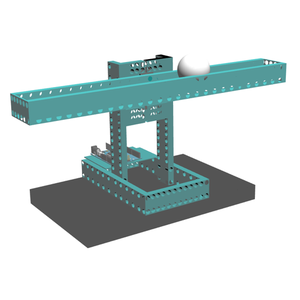
Microcontroller Kit를 결합하여 마이크로컨트롤러의 코드작성과 배치를 빠르게할 수 있으며, 마이크로컨트롤러를 독립 제어기로 실행할 수 있습니다. 이 예는 빔 위에 있는 공의 균형을 맞추는 컨트롤러를 설계하고 배치합니다.
공의 위치와 속도 및 빔의 각도 사이의 관계에 대한 선형 상태 공간 표현을 구합니다.
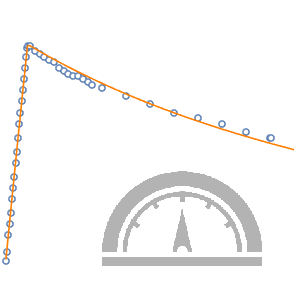
하드웨어 구성 요소에 대한 모델을 보정하고, 그 전달 함수를 얻습니다. 문서 센터의 Microcontroller Kit를 참고하면 단계별 절차를 수월하게 수행할 수 있습니다.
IR센서, 서보 기구, 가변저항의 전달 함수를 얻습니다.
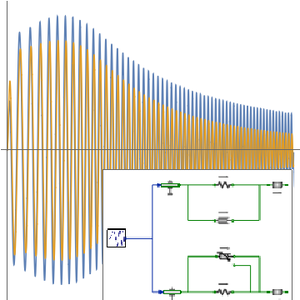
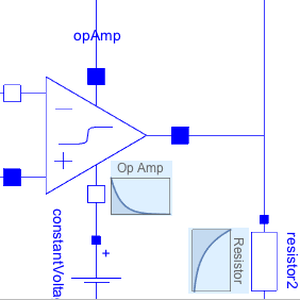
서보의 극단적인 움직임을 제한하여 비교기와 PID 출력을 적절한 서보 입력으로 변환하는 구성 요소를 모델링합니다.
선형화된 모델에 따라 자동 조절 기능을 사용하여 PID 제어기를 얻습니다.
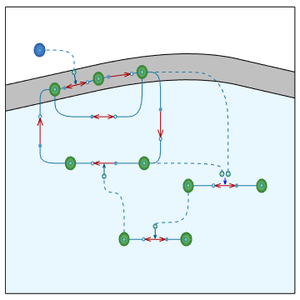
모델화된 하드웨어 구성 요소에 접속하여 PID 제어기로 피드백 모델을 작성합니다.
Arduino UNO 보드와 통신하기 위한 기계 특유의 설정을 정의합니다.
Arduino의 서보 라이브러리와 핀에 접속을 설정합니다.
추출 주기를 정의합니다.
제어기를 Arduino UNO에 배치합니다.