Déploiement du contrôleur sur le matériel
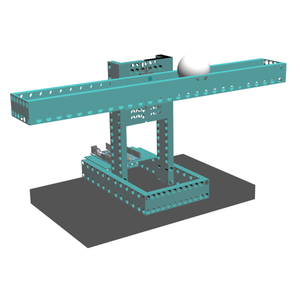
En le combinant avec le Microcontroller Kit, vous pouvez rapidement générer et déployer du code sur un microcontrôleur afin que celui-ci fonctionne comme un contrôleur autonome. Dans cet exemple, un contrôleur pour équilibrer une balle sur une poutre est conçu et déployé.
Trouvez une représentation linéarisée de la relation entre la position et la vitesse de la balle et l'angle du faisceau dans l'espace d'état.
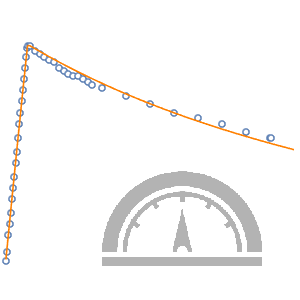
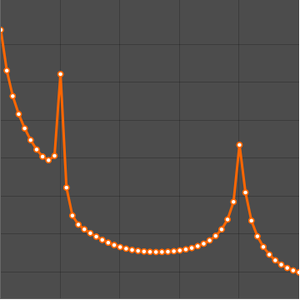
Calibrez les modèles pour les composants matériels et obtenez leurs fonctions de transfert. Vous pouvez vous référer au Microcontroller Kit dans le Centre de documentation et suivre les instructions pas à pas.
Procurez-vous les fonctions de transfert pour le capteur IR, le servo et le potentiomètre.
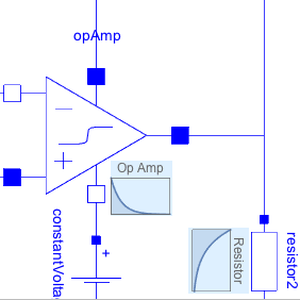
Limitez les mouvements extrêmes du servo et modélisez le comparateur ainsi qu'un composant transformant la sortie PID en une entrée servo appropriée.
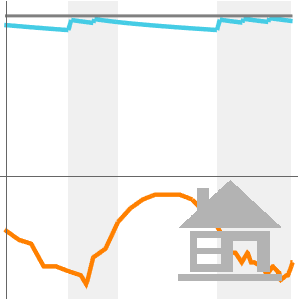
Obtenez un régulateur PID en utilisant les fonctions de réglage automatique, basées sur le modèle linéarisé.
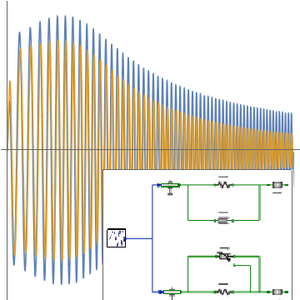
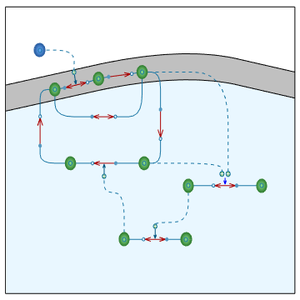
Connectez les composants matériels modélisés et créez un modèle de rétroaction avec le régulateur PID.
Définissez les paramètres spécifiques à la machine pour communiquer avec la carte Arduino Uno.
Configurez la bibliothèque de servo et les connexions aux broches de l'Arduino.
Définissez la période d'échantillonnage.
Déployez le contrôleur dans l'Arduino Uno.