ハードウェアに制御器を実装する
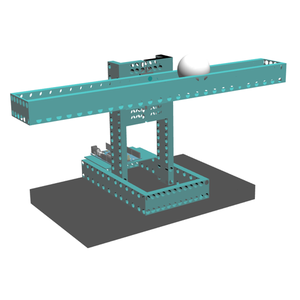
Microcontroller Kitを組み合せると,マイクロコントローラのコードの作成と配備が速やかにでき,マイクロコントローラをスタンドアロンの制御器として実行することができる.この例では梁の上のボールのバランスを取る.
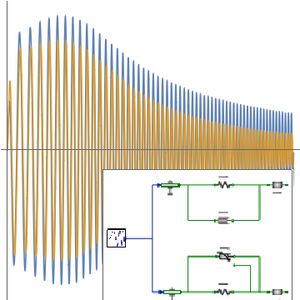
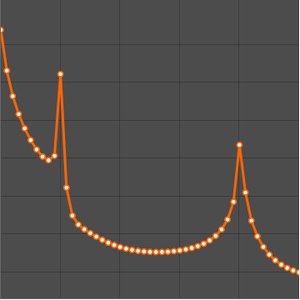
ボールの位置と速さおよび梁の角度の間の関係の線形状態空間表現を求める.
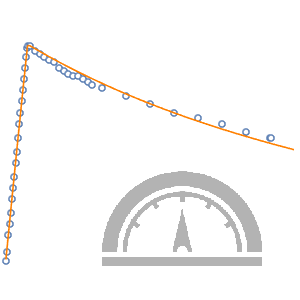
ハードウェアコンポーネント用にモデルをキャリブレーションして,その伝達関数を得る.ドキュメントセンターのMicrocontroller Kitを参考にして順を追った手順に従うとよい.
IRセンサー,サーボ,電位差計の伝達関数を得る.
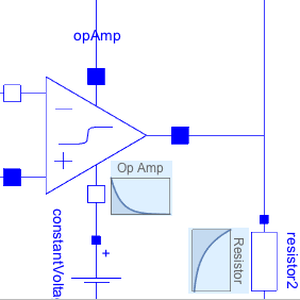
サーボの極端な動きを制限して,コンパレータとPID出力を適切なサーボ入力に変換するコンポーネントをモデル化する.
線形化されたモデルに基づき,自動調整機能を使ってPID制御器を得る.
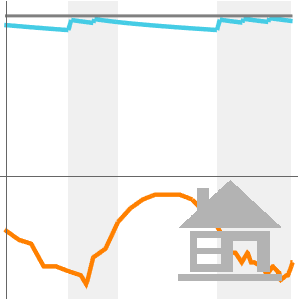
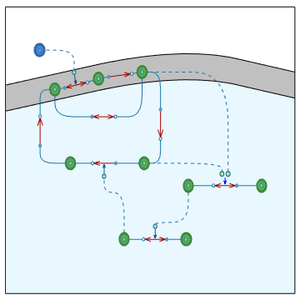
モデル化されたハードウェアコンポーネントに接続し,PID制御器でフィードバックモデルを作成する.
Arduino UNOボードと通信するためのマシン特有の設定を定義する.
Arduinoのサーボライブラリとピンへの接続を設定する.
抽出周期を定義する.
制御器をArduino UNOに配備する.