将控制器部署到硬件
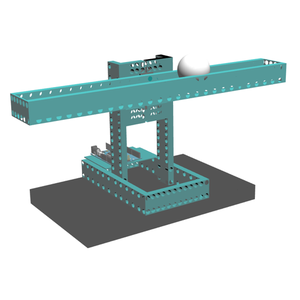
通过与 Microcontroller Kit 相结合,您可以在微控制器上快速生成和部署代码,使其运行独立的控制器。在该范例中,设计并部署了用于平衡梁上的球的控制器。
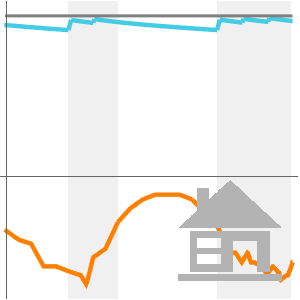
找到球的位置和速度与光束角度之间关系的线性化状态空间表示。
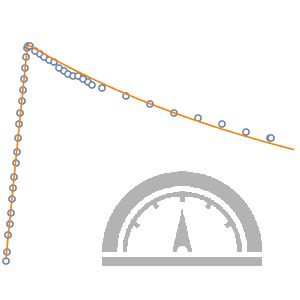
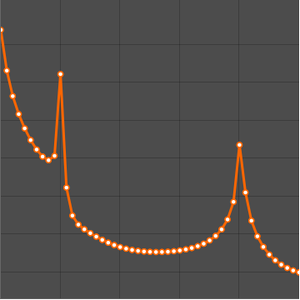
校准硬件组件的模型并获取其传输函数。您可以参考文档中心的 Microcontroller Kit,并按照分步说明进行操作。
获取红外传感器、伺服和电位计的传递函数。
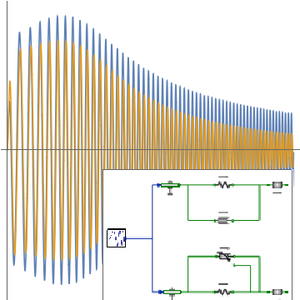
限制伺服的极限运动并对比较器进行建模,并将 PID 输出转换为合适的伺服输入。
基于线性化模型,使用自动调整功能获取 PID 控制器。
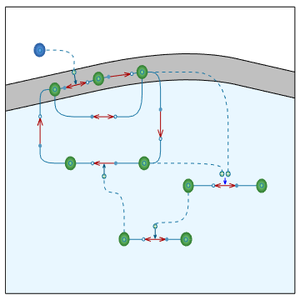
连接建模的硬件组件并使用 PID 控制器创建反馈模型。
定义机器特定设置以便与 Arduino Uno 板通信。
设置伺服库并连接到 Arduino 上的引脚。
定义采样周期。
将控制器部署到 Arduino Uno 中。