Regler auf Hardware bereitstellen
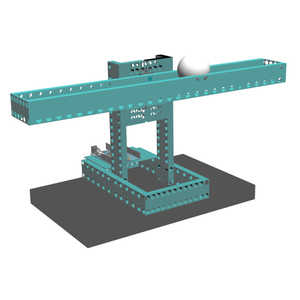
Durch die Kombination mit dem Microcontroller Kit können Sie Code ganz unkompliziert auf einem Mikrocontroller generieren und bereitstellen, so dass dieser als eigenständiger Regler betrieben werden kann. In diesem Beispiel wird eine Steuerung zum Balancieren einer Kugel auf einem Balken entworfen und eingesetzt.
Finden Sie eine linearisierte Zustandsraumdarstellung der Beziehung zwischen der Position und Geschwindigkeit der Kugel und dem Balkenwinkel.
Kalibrieren Sie Modelle für die Hardwarekomponenten und erhalten Sie deren Übertragungsfunktionen. Sie können im Microcontroller Kit im Documentation Center nachschauen und die Schritt-für-Schritt-Anleitung befolgen.
Holen Sie sich die Übertragungsfunktionen für IR-Sensor, Servo und Potentiometer.
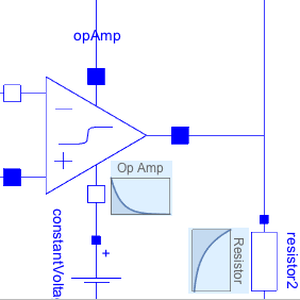
Begrenzen Sie die extremen Bewegungen des Servos und modellieren Sie den Komparator und eine Komponente, die den PID-Ausgang in den passenden Servoeingang umwandelt.
Erhalten Sie einen PID-Regler mit den Auto-Tuning-Funktionen, basierend auf dem linearisierten Modell.
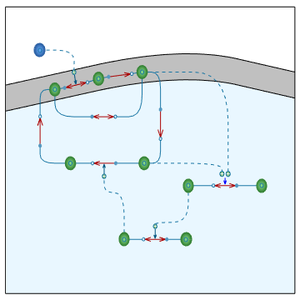
Verbinden Sie die modellierten Hardwarekomponenten und erstellen Sie mit dem PID-Regler ein Feedback-Modell.
Definieren Sie die maschinenspezifischen Einstellungen für die Kommunikation mit dem Arduino Uno Board.
Wählen Sie die Servo-Library aus und verbinden Sie diese mit den Pins des Arduino.
Definieren Sie den Stichprobenzeitraum.
Deployen Sie nun den Regler auf den Arduino Uno.