Vertical Motion of a Drone
Automatically measure performance of a controlled system, such as rise time, settling time, overshoot and more. In this example, you can observe the climb, descent and hover motion of a drone.
To run this example, you'll need
The latest versions of System Modeler and Mathematica.
Please make a selection:
Get afree trial Continue
with download
Model of the Drone
The chassis and propellers of the drone are modeled using built-in components. The angles and height are controlled using PID controllers.
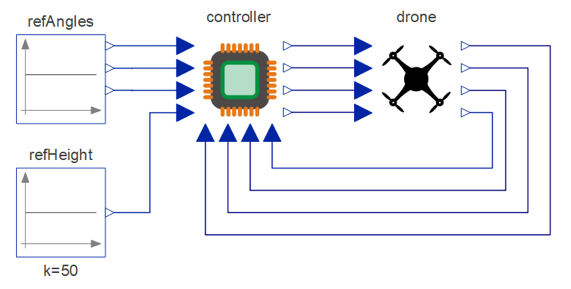
The drone body is connected to a PID controller. The roll, pitch and yaw are set to 0 degrees. The height is set at 50 m.
Check the Performance of the Controlled System
Automatically measure the performance of the controlled system using Wolfram Language.
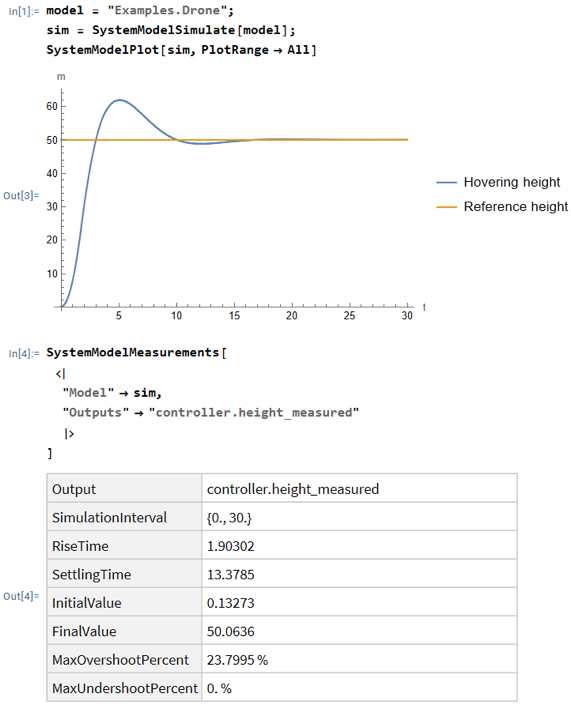
The drone took 13.38 seconds to reach a height of 50 m with an overshoot of 23.8 %.
Compare Scenarios
Test the response for different PID controller gains and compute the controller performance for a custom interval.
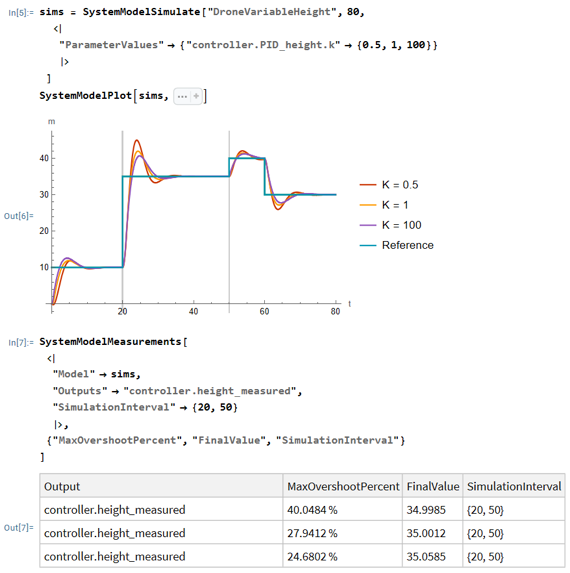
A gain of 100 (purple curve) has the lowest overshoot.
Wolfram System Modeler
Try
Buy
System Modeler is available in English
and Japanese
on Windows, macOS & Linux »
Questions? Comments? Contact a Wolfram expert »