
All Classes and Courses
Browse the catalog for self-paced interactive courses, video lessons and video courses, as well as scheduled instructor-led sessions, study groups, webinars and special events.
Click any button to browse all catalog resources in a particular area or use the filters to refine your search. Learn about the different course types.

Turn Rough Ideas into Computation with Wolfram Notebook Assistant

An Elementary Introduction to Wolfram Language

Computational Chemistry and Bioscience with Wolfram Language
Computational Economics with Wolfram Language
Computational Physics and Astrophysics with Wolfram Language

Computational Social Science with Wolfram Language
Daily Study Group: Convolutional Neural Networks for Computer Vision

Deploying Ideas with Wolfram Notebooks
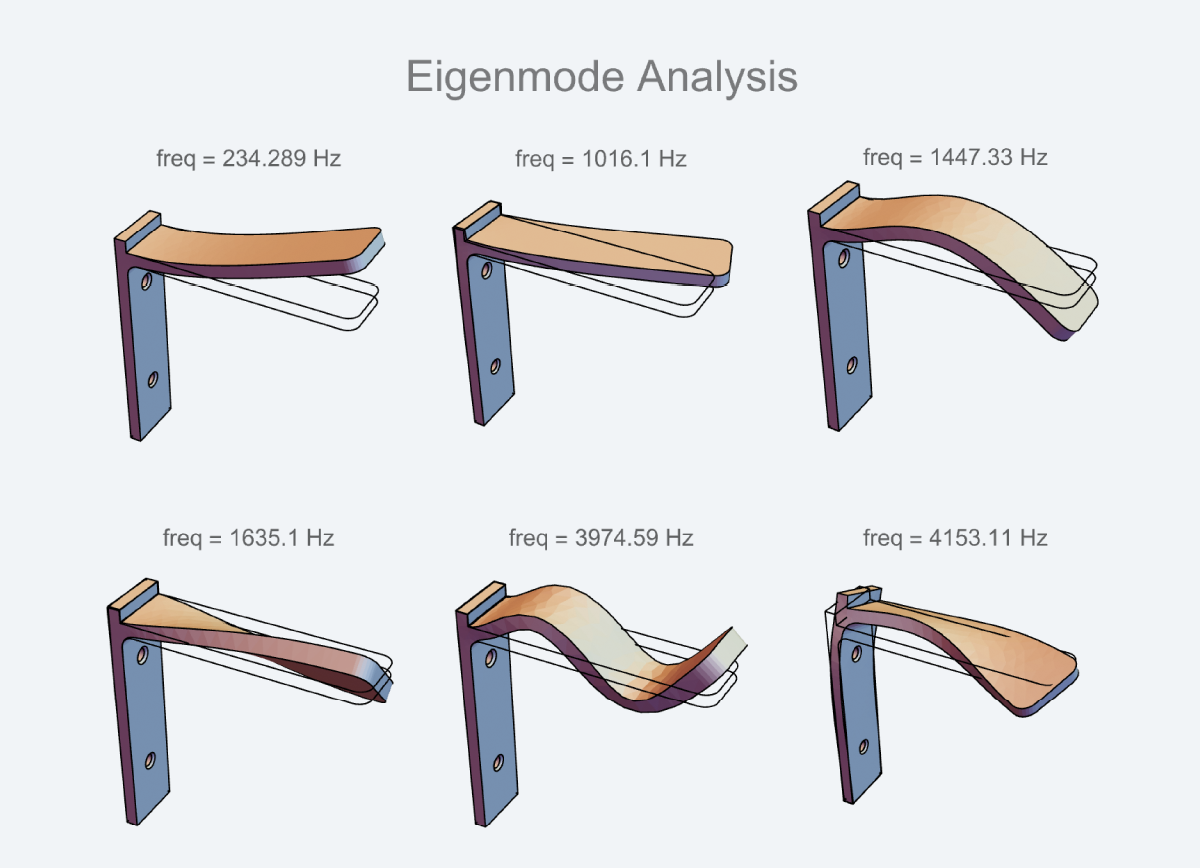
Engineering Computation with Wolfram Language
Exploring Wolfram Documentation Workflows
Introduction to Game Theory
New in Wolfram Language and Mathematica 15
Using Wolfram Documentation

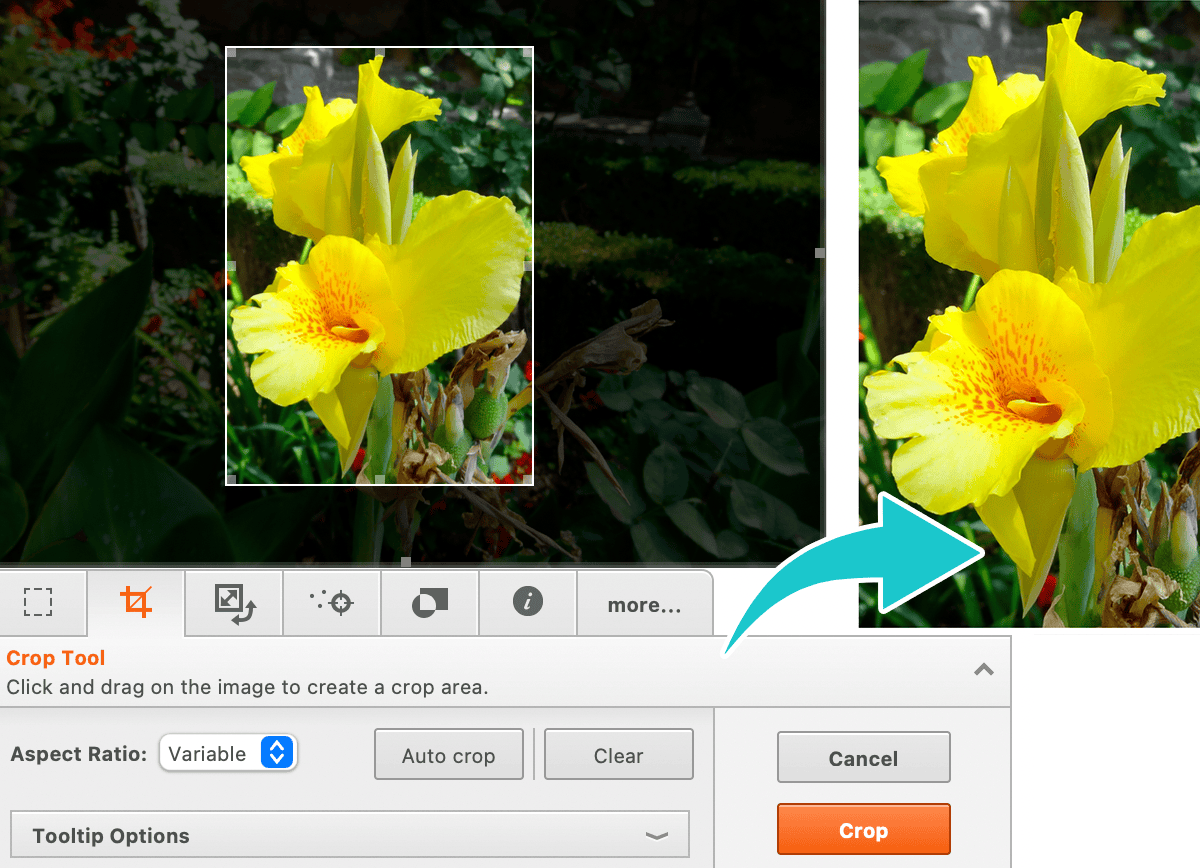
Video Creation, Editing and Analysis Using Wolfram Language

Wolfram Demonstrations Project
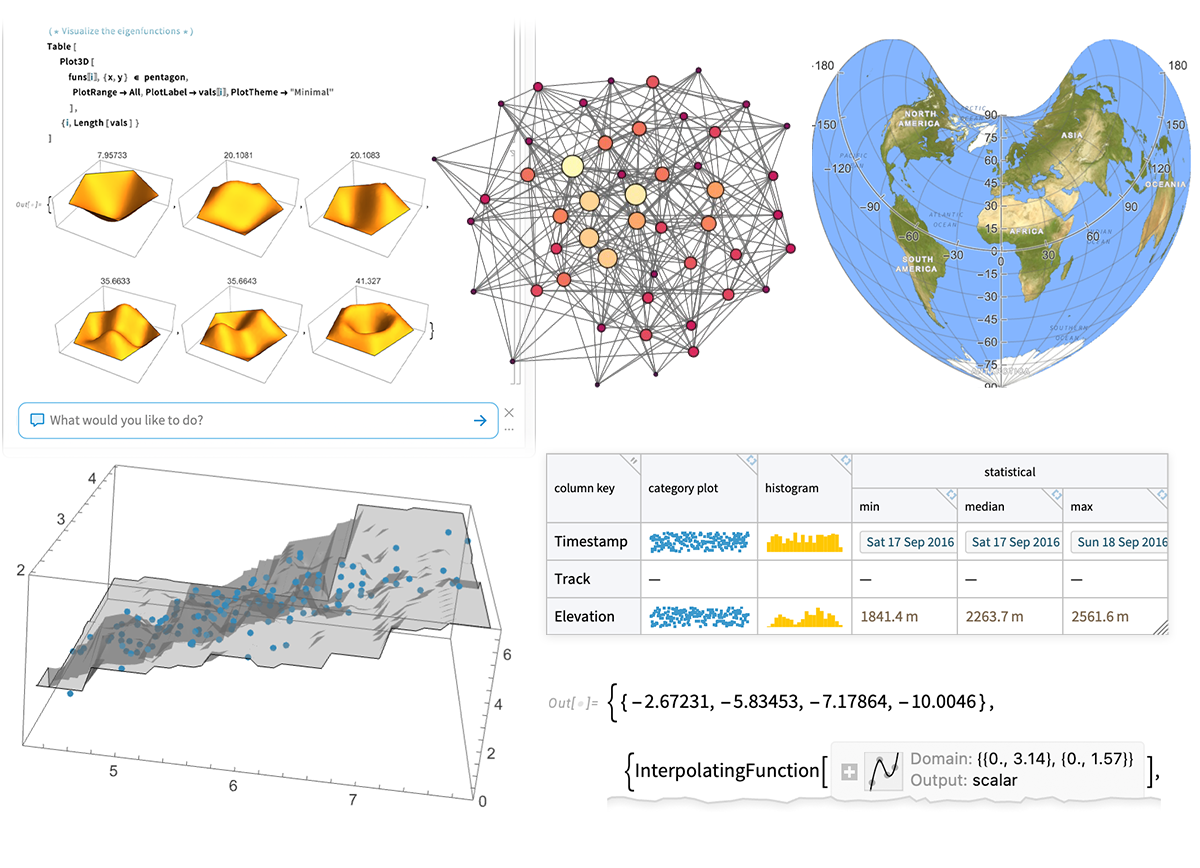
Computational Xplorations

Daily Study Groups

Exploring AI Foundations with Wolfram Tools

Hands-on Start to Wolfram Mathematica Training Tutorials

Introduction to Calculus

Introduction to Differential Equations

Introduction to Discrete Mathematics

Introduction to Electric Circuits

Introduction to Neural Networks in Wolfram Language

Course Type
- Interactive Courses
- Video Lessons
- Video Courses
- Instructor-led Courses
- Archived and Special Events
Interactive Courses
Also known as MOOCs (massive open online courses), these courses are hosted on the Wolfram Cloud and allow you to interactively explore concepts using Wolfram Language functionality.
Self-paced with progress tracking
Include video lessons, exercises and problems, quizzes, exams and a scratch notebook
Sharable completion certificates available for all courses
Wolfram Level 1 proficiency certifications available for select courses
Video Lessons
Short recorded lessons that provide limited instruction on a computational topic or for using Wolfram tech.
Quick-start videos
Lessons from content experts
A wide variety of beginner-level lessons
Free to watch
Video Courses
Video series that build on preceding lessons to provide comprehensive instruction.
Each video course features a playlist of sequential lessons
Recorded by Wolfram certified instructors
Comprehensive coverage of a particular topic
Free to watch
Instructor-led Courses
Scheduled as online and in-person classes, these courses provide comprehensive instruction guided by a live instructor.
Registration required to reserve your seat
Taught by Wolfram certified instructors
Opportunity to pose live questions to experts in the room
Course completion certificates available
Archived and Special Events
Presentations by Wolfram developers, content experts and instructors.
Webinars on special topics and new release functionality
Livecoding sessions
Wolfram Daily Study Groups
Free to watch