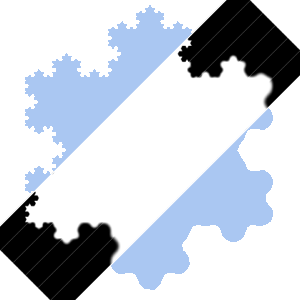
找出投影变换的关键点
版本 12 在 ImageKeypoints 中添加了许多新型关键点,可用于检测和跟踪兴趣点。可快速计算出 ORB 关键点描述符,且 ORB 具有旋转不变性,因此它们非常适合于根据对应点计算转换矩阵。
用 ImageCorrespondingPoints 计算对应点。
然后计算几何转换矩阵。
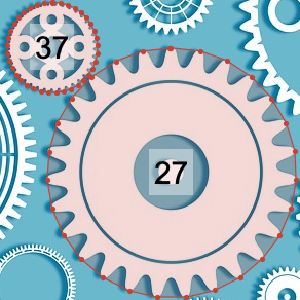
以下是第一张图像中两个拱门的形状。
通过估计的变换矩阵,可以在第二个图像中找到变换后的拱门区域。
版本 12 在 ImageKeypoints 中添加了许多新型关键点,可用于检测和跟踪兴趣点。可快速计算出 ORB 关键点描述符,且 ORB 具有旋转不变性,因此它们非常适合于根据对应点计算转换矩阵。
用 ImageCorrespondingPoints 计算对应点。
然后计算几何转换矩阵。
以下是第一张图像中两个拱门的形状。
通过估计的变换矩阵,可以在第二个图像中找到变换后的拱门区域。