Diseño de controladores
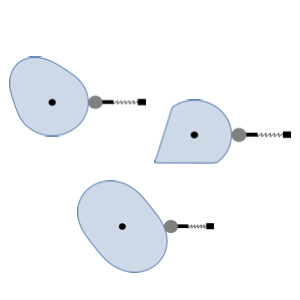
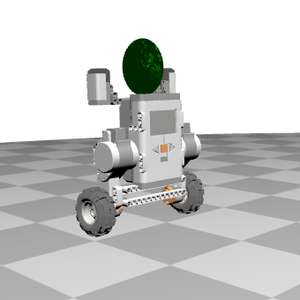
Los controladores se pueden encontrar en todo, desde cohetes durante el despegue hasta rascacielos y transportes personales Segway. Al combinar la estructura de sistema de control de Wolfram Language con los modelos del sistema, los sistemas de control se pueden diseñar y probar fácilmente. En este ejemplo, se diseña un controlador para mantener un transporte personal Segway en posición vertical, basado en una representación linealizada del modelo.
Linealice un modelo de Segway alrededor de la posición vertical utilizando los valores iniciales del modelo y extraiga las variables de estado que le interesen.
Defina variables de peso para el diseño de control. Use una penalización grande para las desviaciones en el ángulo del Segway (revolute1.phi).
Calcule las ganancias para el controlador LQ.
Guarde los valores calculados del controlador LQ en el modelo con un controlador.
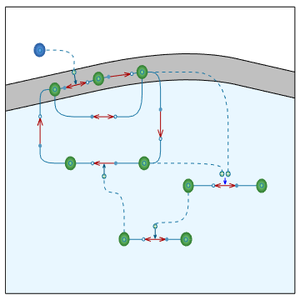
Con los parámetros de control guardados en el modelo, muestre una animación 3D en SystemModeler.