Implementación de controladores a hardware
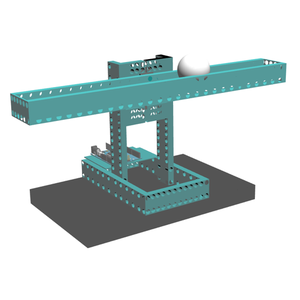
Puede generar e implementar código rápidamente en un microcontrolador combinándolo con el Kit de microcontroladores para hacer que ejecute un controlador independiente. El siguiente ejemplo muestra el diseño e implementación de un controlador para equilibrar una bola en una viga.
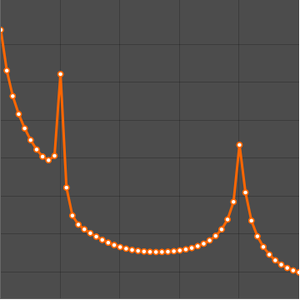
Encuentre una relación linealizada del estado del espacio de la relación entre la posición y velocidad de la bola, y el ángulo de la viga.
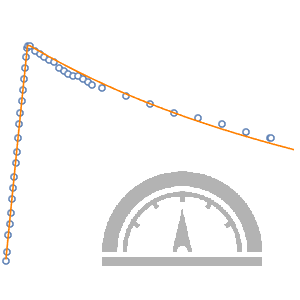
Calibre modelos para los componentes de hardware y obtenga sus funciones de transferencia. Puede hacer referencia al Kit de microcontroladores en el Centro de Documentación, y seguir las instrucciones paso a paso.
Obtenga las funciones de transferencia para el sensor IR, el servo y el potenciómetro.
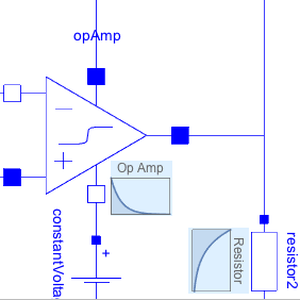
Limite los movimientos extremos del servo y modele el comparador y un componente para transformar la salida PID a la entrada de servo apropiada.
Obtenga un controlador PID utilizando las características de ajuste automático basadas en el modelo linealizado.
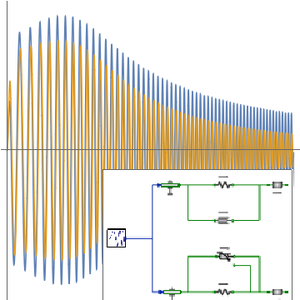
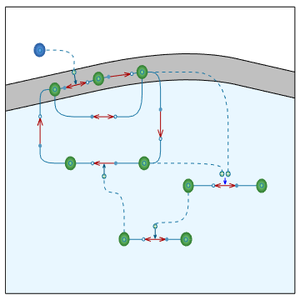
Conecte los componentes de hardware modelados y cree un modelo de retroalimentación con el controlador PID.
Defina los ajustes específicos de la máquina para comunicarse con la placa Arduino Uno.
Configure la biblioteca servo y las conexiones a los pines en la placa Arduino.
Defina el período de muestreo.
Despliegue el controlador en el Arduino Uno.