ボールと梁:ハードウェアにコントローラを配備する
制御系の設計,配備,テストのためのV字モデルを実装します.System Modelerでシステムをモデル化してWolfram言語で制御器を設計します.Microcontroller Kit を使って自動化されたコードを生成し,それをマイクロコントローラに配備します.その後制御目標を使ってスタンドアロンモデルを検証します.この例では,梁の上のボールのバランスを保つPID制御器を設計,配備,テストする方法を示します.
モデル
ボールと梁の配置はSystem Modelerでモデル化され,ボールの位置と梁の角度の関係の線形化された状態空間表現が得られます.この関係は,Wolfram言語でPID制御器のパラメータを自動調整するために使用されます.
System Modelerでシステムをモデル化する
ボールと梁の配置をモデル化します.
ボールと梁の配置のモデル
コンポーネントの調整
各種ハードウェアコンポーネントを調整し,その伝達関数を取得します.次にこれらの伝達関数を接続し,PID制御器を使用したフィードバックモデルを設計します.
コンポーネントの調整
ModelPlugライブラリを使って,サーボ,IRセンサー,ポテンショメータを調整します.
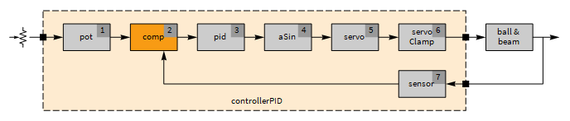
PID制御器と関連するハードウェアコンポーネントの概略図.
ハードウェアへの配備
Arduino UNOボードと通信するためのマシン固有の設定を定義し,サーボ ライブラリおよびArduinoのピンへの接続を設定します.最後に,サンプリング周期を定義し,制御器をArduino UNOボードに配備します.
Wolfram言語で制御器をハードウェアに配備する
Microcontroller Kitを使って制御器をハードウェアに配備します.
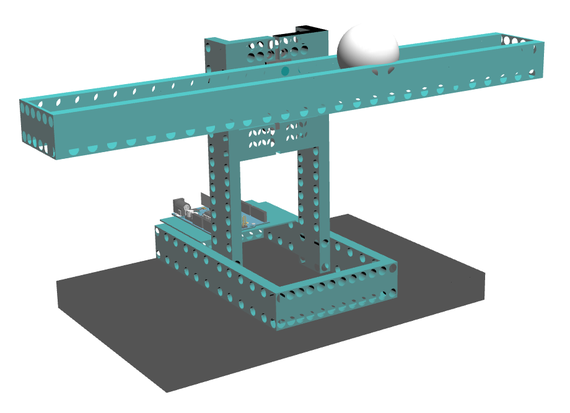
使用中のボールと梁モデル.
Wolfram System Modeler
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »