Use archivos CAD de las piezas de LEGO para personalizar la animación 3D generada.
Para ejecutar este ejemplo necesitará
Por favor haga una selección:
Obtener unaCree bibliotecas personalizadas
Construya componentes para del Segway de LEGO utilizando bibliotecas existentes.
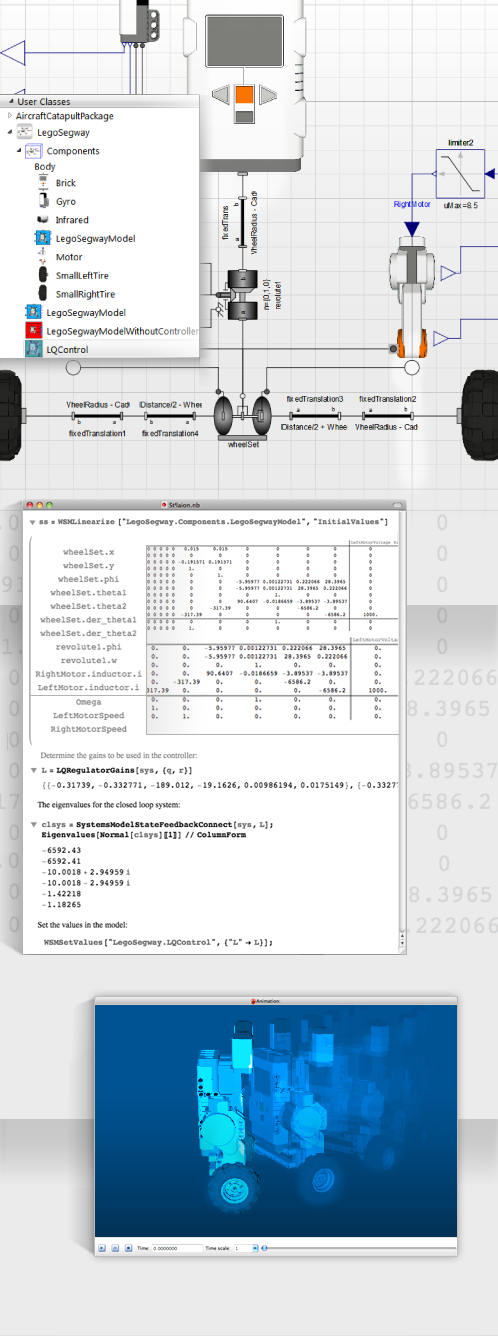
Diseñe el controlador
Use Mathematica para encontrar ganancias de control adecuadas y mantener el Segway en posición vertical.
Linealice el modelo
Linealice el modelo alrededor del punto estacionario en posición vertical.
Animate en 3D de manera automática
Visualice la animación 3D generada automáticamente a partir del modelo.
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »