制御付きのサーボ
油圧サーボシステムは機械ツール産業等,幅広い産業分野で広く使われています.この油圧サーボの例では,荷重を指定されたさまざまな場所に動かすために,方向制御バルブを使って,流体をシリンダーに流入させたりシリンダーから流出させたりします.
サーボモデル
ポンプコンポーネントはタンク1から制御バルブまで液体を押し出し,その後荷重が左右のどちらに動くべきかによって,制御バルブが液体を二重シリンダの右室か左室に振り分けます.
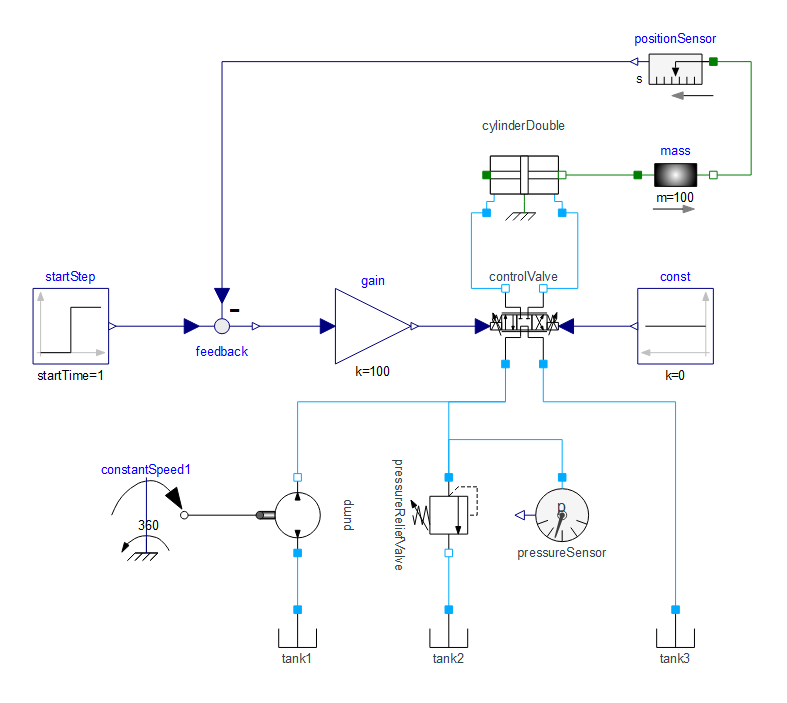
Wolfram System Modelerのダイアグラムビューで表示されるサーボモデル
シミュレーション結果
以下のシミュレーションプロットを調べて,方向制御バルブが流体を左と右のどちらかに流すためにその位置をどのように変化させるか,またこれによって最終的に荷重がさまざまな位置にどのように動くかを見ることができます.
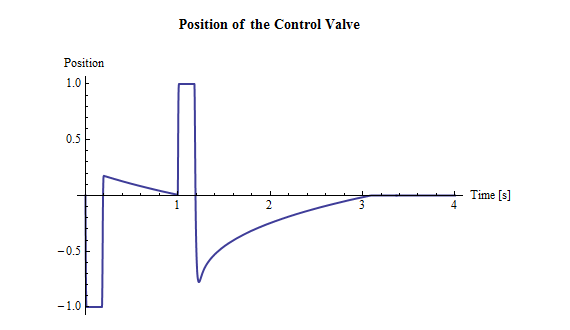
このプロットは制御バルブの位置が左(-1)から中央(0),右(1),再び中央へとどのように動くかを示す.
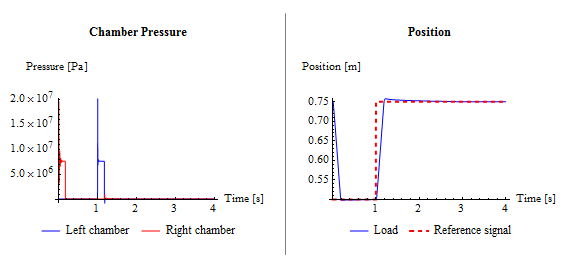
左のプロット(左室・右室の圧力)は左室と右室において圧力がどのように変化するかを示している.これはもちろんシステムに入ってくる(実際の荷重の位置を表した右のプロットで見られる)参照信号と相関関係がある.荷重が0.75 mから0.5 mに移動すると,流体は右室に流れ込み圧力が上がる.0.5 mから0.75 mに移動すると反対のことが起き,左室の圧力が上がる.
Wolfram System Modeler
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »