ボールのバランスを取る
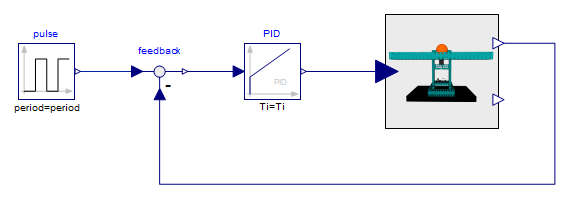
このモデルでは,梁の上を転がるボールを調べます.ボールの並進加速度は梁の角度によって異なります.この例では,梁の角度を入力として使用して,梁に沿ったボールの位置を制御するために使用できるPID制御器とLQ制御器という2つの異なる制御方式を見てみます.
モデル
重力はボールに作用し,物体の質量に比例した下向きの力を与えます.梁が重力に対して垂直で地面と平行な場合,法線力は重力を正確に打ち消すためボールに加速は適用されません.梁の角度を慎重に設定することで,梁に沿ったボールの位置が制御できます.このモデルを使うと,シミュレーションとハードウェアとのリアルタイム接続の両方で,ボールの位置を制御するさまざまな方法を試すことができます.
梁の角度はサーボによって正確に制御される.梁の両側にはボールが梁から転がり落ちるのを防ぐバンパーがある.モデルには,システムを可視化するためにカスタムのCADモデルがロードされた多体オブジェクトが含まれている.
可視化
モデルはSystem ModelerでMultiBodyライブラリを使用して構築されるため,モデルのアニメーションが自動的に生成されます.現実世界のシステムを正確に表現するために,カスタムのCADモデルがオブジェクトにロードされています.
モデルからの出力は現実世界のシステムを制御するために使われ,現実世界のシステムからの入力はモデルをアニメーション化するために使われる.
制御器の設計
Wolfram言語とSystem Modelerを一緒に使うことで,モデルに基づいてハードウェアの制御器を設計することができます.

Wolfram言語はシステムモデルを自動的に線形化することができ,これをPID制御器の極配置に使用したり,LQ制御器のゲインを計算したりすることができる.
制御器が構築されると,ModelPlugライブラリを使用して制御器をソフトウェアモデルまたはカスタムハードウェアに簡単に接続し,制御器の性能が比較できる.
設計と比較
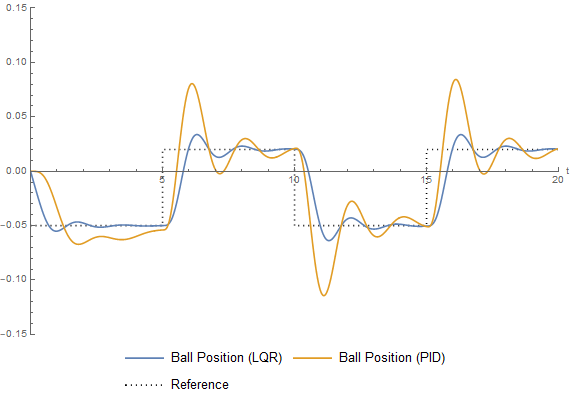
Wolfram言語を使って制御器を設計し,その出力を比較します.
Wolfram System Modeler
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »