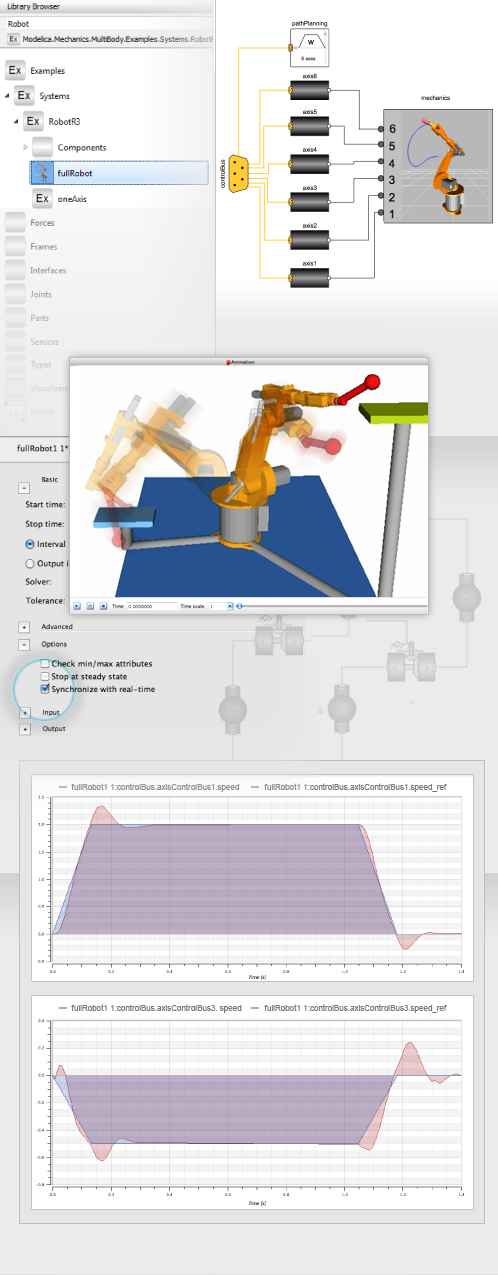
Reference and measurement signals for two of the robot's six axes
To run this example, you'll need
Please make a selection:
Get aUse Built-in Models
Access the built-in example models to study and use as building blocks.
Real-Time Simulation
Run the simulation at the same speed as the physical robot.
Automatic 3D Animation
This animation is automatically created based on the model's layout.
Path Planning
Compare how the actual paths correspond to the planned paths of the robot.
Try
Buy
System Modeler is available in English
and Japanese
on Windows, macOS & Linux »
Questions? Comments? Contact a Wolfram expert »