Linear actuator in which a control force drives the leg length toward the reference signal
To run this example, you'll need
Please make a selection:
Get aCustom Visualization with Mathematica
Create polished visualizations and animations with Mathematica's full 2D and 3D graphics language.
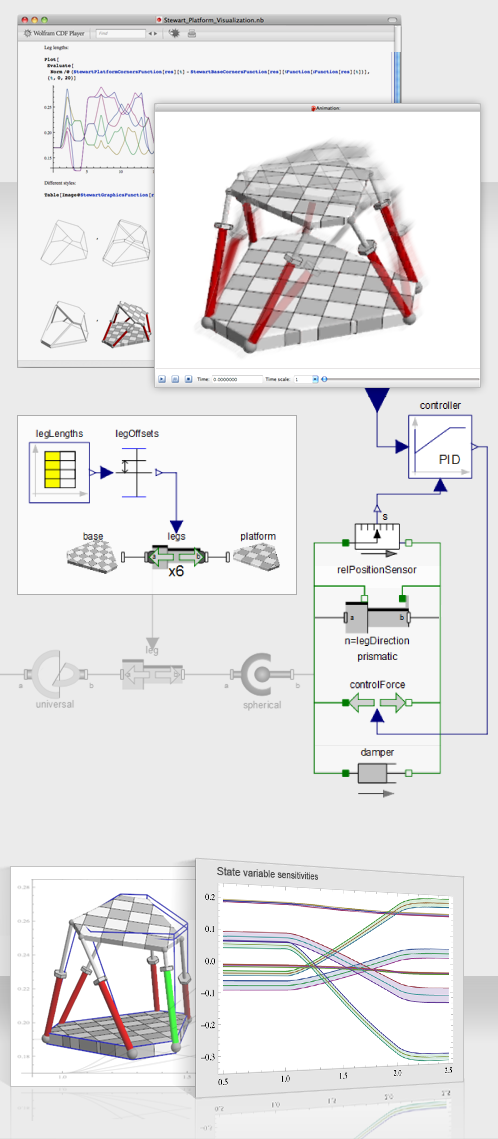
Sensitivity Analysis
Study the sensitivity of the six state variables to a systematic error in the length of one leg.
Video Export
Develop high-quality custom animations in Mathematica and export to standard video formats.
Reusable Custom Components
Create a component representing an idealized linear actuator that can be reused in other mechanical models.
Try
Buy
System Modeler is available in English
and Japanese
on Windows, macOS & Linux »
Questions? Comments? Contact a Wolfram expert »