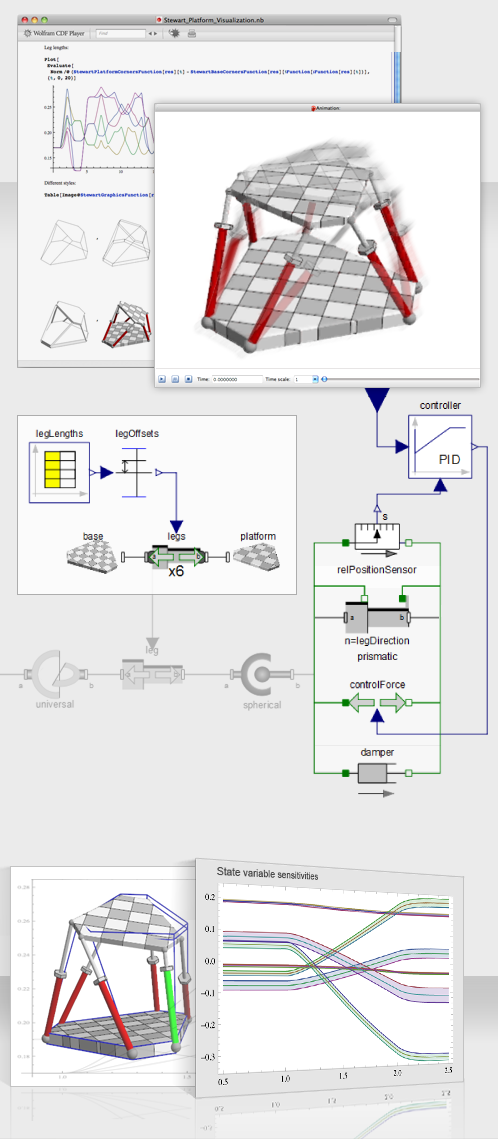
制御力が脚の長さを基準信号に向けて駆動するリニアアクチュエータ
Mathematicaで可視化をカスタマイズ
Mathematicaの完全な2Dおよび3Dのグラフィックス言語を使って,洗練された可視化やアニメーションを作成します.
感度解析
1本の脚の長さにおける系統誤差に対する6個の状態変数の感度を調べます.
再利用可能なカスタムコンポーネント
理想のリニアアクチュエータを表すコンポーネントを作成します.これは他の機械モデルで再利用することができます.
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »