转动惯量
探索涵盖包括转动惯量在内的刚体物理参数的新功能.
In[1]:=
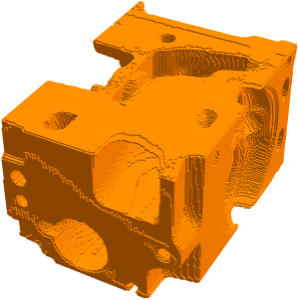
wrench = ExampleData[{"Geometry3D", "Wrench"}, "Region"]Out[1]=

选择一个点让扳手绕着它转.
In[2]:=
point = {-8, -0.168, 0};In[3]:=
Show[wrench, Graphics3D[{PointSize[Large], Point[point]}],
ViewPoint -> {0, -\[Infinity], 0}]Out[3]=

惯性矩阵的中心在此点上.
In[4]:=
\[ScriptCapitalI] = MomentOfInertia[wrench, point]Out[4]=
找出主轴,也就是刚体趋向于围绕其转动的轴.
In[5]:=
principalaxes = Eigenvectors[\[ScriptCapitalI]]Out[5]=
找出惯量椭球,其半径表示围绕主轴加速时所受的相对阻力.
In[6]:=
inertiaellipsoid = Ellipsoid[point, 1000 Inverse[\[ScriptCapitalI]]]Out[6]=
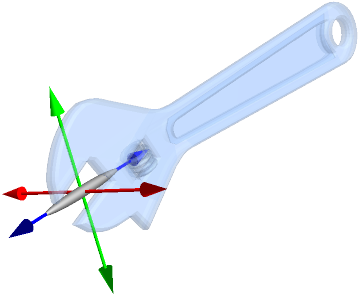
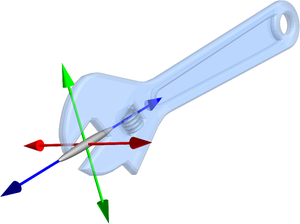
图示扳手及其主轴和惯量椭球. 扳手手柄使得椭球沿其轴线伸长.
显示完整的 Wolfram 语言输入
In[8]:=
Show[wrench, axes, BaseStyle -> Opacity[0.3]]Out[8]=